Variable Structure Systems
This document delves into the motivations and aims of using linear and static output feedback to stabilize Variable Structure Systems (VSS) through enhanced control techniques. It discusses various approaches, including trajectory manipulation and the implementation of Sliding Mode Control (SMC). We analyze unmatched uncertainty, trajectory convergence to the sliding manifold, and the effects of discontinuous nonlinearity on system robustness. The challenges of chattering effects and their implications for stability and control are also examined.

Variable Structure Systems
E N D
Presentation Transcript
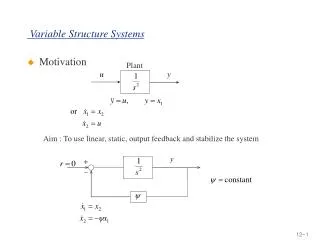
Plant + _ Variable Structure Systems • Motivation Aim : To use linear, static, output feedback and stabilize the system
Variable Structure Systems (Continued) Combine these two, introduce the controller Result : Spiraling in at 0
Variable Structure Systems (Continued) There are other possibilities
Alternate Approach In both of these examples, we use the existing trajectories and attach these to original dynamics so that the goal is achieved. There is another approach – to create new trajectories. Consider the case
where Sliding Mode Control Consider the system
Sliding Mode Control (Continued) unmatched uncertainty matched uncertainty
Sliding Mode Control (Continued) (1) (2) equivalent control is chosen to cancel the known terms
From (1),(2) (3) First write (3) as p scalar equations Sliding Mode Control (Continued)
reaching phase during which trajectories starting off the manifold z=0 move toward it and reach it in finite time sliding phase during which the motion will be confined to manifold z=0 and the dynamics of the system will be represented by the reduced order system (i) (ii) (iii) Sliding Mode Control (Continued) Thus sliding mode control Thus
switching manifold z>0 delay between the time z changes and the time the control switches z<0 a Robustness & Discontinuous Nonlinearity • Robustness to uncertainties During reaching phase : forcing trajectories toward sliding manifold maintaining them on the manifold This task is affected by matched and unmatched uncertainty During sliding phase : This task is affected by unmatched uncertainty • Discontinuous nonlinearity in sliding mode controller Theoretical issue : uniqueness & existence Practical issue : chattering due to imperfect switching devices and delay
1 1 y y -1 -1 Chattering Effects
Example 1 Ex:
Example 2 Ex: