Download
1 / 51
510 likes | 532 Vues
This research explores the application of the duality principle in achieving consistencies for ultra-weak solutions in minimax weighted CSPs. It discusses lower bound formulations, upper bounds using duality principles, and enhancing bounds with WCSP consistencies. The study evaluates the performance of these techniques and outlines future work. The focus is on Radio Link Frequency Assignment Problems, involving soft constrained problems and the weighted CSPs/COPs model. The research addresses the nature of the problem, optimization strategies to minimize interferences, and considerations for insecure regions subject to control by adversaries. It presents a game-theoretic perspective and compares levels of solutions in solving Radio Link Frequency Assignment Problems. The study introduces stronger solutions for insecure regions by assuming worst-case adversaries and explores minimax weighted CSPs to efficiently handle multiple sub-problems.

E N D
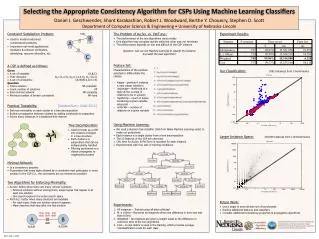
Consistencies for Ultra-Weak Solutions inMinimax Weighted CSPs Using the Duality Principle Arnaud Lallouet1, Jimmy H.M. Lee2, andTerrence W.K. Mak2 1Université de Caen, GREYC, Caen, France Arnaud.Lallouet@unicaen.fr 2The Chinese University of Hong Kong, Shatin, N.T., Hong Kong {jlee,wkmak}@cse.cuhk.edu.hk
Introduction • Motivation • Minimax Weighted CSPs • Ultra-weakly solved, weakly solved, and strongly solved • Consistency Techniques • Lower Bound formulations • Upper Bounds using duality principle • Strengthening lower and upper bounds by adopting WCSP consistencies • Performance Evaluations • Conclusion & Future Work
Radio Link Frequency Assignment Problems • Soft Constrained Problems • Model: Weighted CSPs/COPs • CELAR Problem [Cabon et al., 1999]: • Given a set S of radio links located between pairs of sites • Assign frequencies to S: • Prevent/Minimize interferences • Involves two types of constraints CELAR Problem: http://www.inra.fr/mia/T/schiex/Doc/CELAR.shtml
Radio Link Frequency Assignment Problems D Communication from A to B B C A Communication from B to A
Radio Link Frequency Assignment Problems D Technological constraints |fAB - fBA| = constant B C fAB fBA between two sites A
Radio Link Frequency Assignment Problems D fBC B C fCB fAB between links close to each other fBA A Constraints to prevent interferences: e.g. |fAB - fBC| > threshold Sometimes the problem is unfeasible…
Radio Link Frequency Assignment Problems D fBC B C fCB fAB between links close to each other fBA A Soft constraints to minimize interferences: e.g. max(0, threshold - |fAB - fBC|)
Radio Link Frequency Assignment Problems insecure region Subject to control by adversaries D fBD fDB Minimize interferences? B C Minimize interferences? A
Radio Link Frequency Assignment Problems • Nature of the problem: • Optimization: Minimizing interferences • Adversaries: Controlling parts of the links • We can solve: • Many COPs/WCSPs • Each perform optimization on one combination of adversary’s frequency adjustment • Multiple QCSPs • Reducing into a decision problem
Radio Link Frequency Assignment Problems • Viewing in game theory: • Two-personzero-sumturn-based game • Allis [1994] proposes three solving levels: • Ultra-weakly solved • Best-worst case for a player • Weakly solved • Strategies for a player to achieve his/her best against all possible moves by his/her opponent • Strongly solved • Strategies for a player to achieve his/her best against all legal moves Our work Stronger
Radio Link Frequency Assignment Problems insecure region Assume worst case adversary D fBD Minimize interferences a priori? fDB B C Minimize interferences a posteriori? Minimize interferences a priori? Minimize interferences a posteriori? A Finding frequency assignments for the worst possible case!
Minimax Weighted CSPs To avoid multiple sub-problems, we propose: Minimax Weighted CSPs = Min/Max Quantifiers + Soft Constraints + CSPs ≈ Quantified CSPs Weighted CSPs +
Minimax Weighted CSPs Minimax Weighted CSP [Lee et al., 2011] Variables: x1, x2, x3 Domains: D1=D3 ={a,b,c}, D2 = {a,b} Soft Constraints: Global Upper Boundk: 11 Valuation structure: ([0..k], ⊕, ≤ ) Quantifier Sequence: Q1 = max, Q2 = min, Q3 = max Soft constraints Unary constraint Binary constraint
A-Cost for Sub-problems 4 ⊕ 0 ⊕ 5 ⊕ 1 ⊕ 0 = 10
A-Cost for Sub-problems Best-worst case (ultra-weak solution): {x1 = a, x2 = a, x3 = a} A-cost for the problem: 10
Algorithms for Ultra-Weak Sol. Previous Work [Lee et al., 2011]: • Alpha-beta prunings • Maintains two bounds • Alpha lb: Best costs for max players • Beta ub: Best costs for min players • Suggest Two sufficient conditions to perform prunings and backtracks Computing the exact A-cost is hard! (NP-hard) Theorem: For the set S of sub-problems P ’, where vi is assigned to xi: ∀P ’ ∈ S, A-cost(P ’) ≥ ub(Condition 1), or ∀P ’ ∈ S, A-cost(P ’) ≤ lb(Condition 2) We can prune or backtrack according to the table:
Sufficient Conditions for Prunings How to compute efficiently? Corollary: For the set of sub-problems P’ obtained from P, where vi is assigned to xi: A-cost(P ’) ≥lbaf(P ,xi= vi) ≥ ub(Condition 1), or A-cost(P ’) ≤ ubaf(P ,xi= vi) ≤ lb(Condition 2) We can prune or backtrack according to the table below:
Consistencies • Local consistency enforcement • Make implicit costs information explicit • E.g. bounds, prunings/backtracks • Consistencies composes of 3 parts: • Lower bound estimation: lbaf(P ,xi= vi) • NC& AC version • Upper bound estimation:ubaf(P ,xi= vi) • Two dualities: DC & DQ • Strengthening lower & upper estimation by projections/extensions • Adopt WCSP consistencies: NC*, AC*, FDAC* • Naming convention: • DC-NC[proj-NC*], DQ-AC[proj-FDAC*]
Lower Bound Estimation • Lower bound estimation: lbaf(P ,xi= vi) • Consider a simplified problem: • Only unary constraints, i.e. no binary Lemma: The A-cost of an MWCSP P with only unary constraints is equal to: Q1C1⊕ Q2C2 ⊕ … ⊕QnCn ⊕ ⊕ = 8 Q1 = max Q2 = min Q3 = max
Lower Bound Estimation • Lower bound (NC version): nclb(P ,xi= vi) • Example: • nclb(P ,x1 = b) • nclb(P ,x2 = a) CØ ⊕ (⊕j<i min Cj) ⊕ Ci(vi) ⊕ (⊕i<jQj Cj) Q1 = max Q2 = min Q3 = max For all sub-problems where x2 = a Q1 = max Q2 = min Q3 = max
Lower Bound Estimation • Lower bound (AC version): aclb[Cij](P ,xi= vi) • nclb(P ,xi= vi) + a binary constraintCij • Example: • aclb(P ,x1 = b) Q1 = max Q2 = min Q3 = max
Upper Bound Estimation • Upper bound ubaf(): Duality of Constraints • Definition of Dual Problem: • Given an MWCSP P = (X,D,C,Q,k). • The dual problem of P is P Τ = (X,D,C Τ,Q Τ,k) where: • Quantifier:Qi = max →Q Τi= min & Qi = min → Q Τi= max • Cost: For a complete assignment l, cost(l) = -1*costΤ(l) Construction Method: -1 Q1 = max Q2 = min -1 Q1 = min Q2 = max
Upper Bound Estimation • Upper bound: Duality of Constraints (DC) • Corollary: A lbaf(P Τ,xi= vi) on the dual multiply by -1 is an ubaf(P ,xi= vi) for the original problem lbaf(P Τ,x2= b) ≤ -11 → -1 * lbaf(P Τ,x2= b) ≥ 11
Upper Bound Estimation • Following the corollary: • We implement ubaf(P ,xi= vi) by: • NC version: nclb(P Τ,xi= vi) • AC version :aclb[Cij](P Τ,xi= vi) • Advantage for Duality of Constraints (DC) • Reuse the same lbaf() • New lbaf() can be used as ubaf()
Upper Bound Estimation • Upper bound: Duality of Quantifiers (DQ) • Creating/Writing new ubaf() via: • Flipping quantifiers of existing lbaf() • Example: • nclb(P ,x2 = a) • ncub(P ,x2 = a) For all sub-problems where x2 = a, guarantee a lower bound Q1 = max Q2 = min Q3 = max For all sub-problems where x2 = a, guarantee an upper bound Q1 = max Q2 = min Q3 = max
Upper Bound Estimation • Upper bound: Duality of Quantifiers (DQ) • Creating/Writing new ubaf() via: • Flipping quantifiers of existing lbaf() • Immediate attempt: • Problem: Binary constraints add costs! CØ ⊕ (⊕j<i min Cj) ⊕ Ci(vi) ⊕ (⊕i<jQj Cj) min to max CØ ⊕ (⊕j<imaxCj) ⊕ Ci(vi) ⊕ (⊕i<jQj Cj)
Upper Bound Estimation • Upper bound: Duality of Quantifiers (DQ) • Creating/Writing new ubaf() via: • Flipping quantifiers of existing lbaf() • To fix: • Further add maximum costs for constraints which are not covered in the function • For implementation: • We pre-compute and add these maximum costs before search • We maintain the added sum during search CØ ⊕ (⊕j<imaxCj) ⊕ Ci(vi) ⊕ (⊕i<jQj Cj)
Consistencies • We have methods to compute: • lbaf(): NC & AC version • Standard approximation analysis • ubaf(): Two dualities • Inspired from QCSP consistencies and algorithms • [Bordeaux and Monfroy, 2002] • [Gent et al., 2005]
Consistencies • Can we further strengthen both estimation functions? • Utilize projections & extensions conditions • WCSP consistencies: NC*, AC*, and FDAC* [Cooper et al., 2010] • For Duality of Constraints (DC) consistencies • Conditions are enforced in both the original and dual problem
Performance Evaluation • Compare and study different consistency notions • DQ-NC[proj-NC*], DQ-AC[proj-AC*], DQ-AC[proj-FDAC*] • DC-NC[proj-NC*], DC-AC[proj-AC*], DC-AC[proj-FDAC*] • Benchmarks: • Randomly Generated Problems • Graph Coloring Game • Generalized Radio Link Frequency Assignment Problem • Each set of parameters: • 20 instances & taking average result • If there are unsolved instances, we state the #solved besides runtime • Compare our results against: • Alpha-beta pruning • QeCode: A solver for solving QCOP+
Performance Evaluation Randomly Generated Problems [Lee et al.,2011] • (n,d,p): (# of vars, domain size, constraint density) • Integer costs of a binary constraint • Generated uniformly in [0…30] for each tuple of assignments • Probability of 50%: a min (max resp.) quantifier • Time limit: 900s Duality of Constraints Extracts costs from two different copies of constraints (original and dual) and resolve the issue • Stronger projection/extension • We may: • Strengtheninglbaf() (ubaf() resp.) • Weakeningubaf() (lbaf() resp.)
Conclusion • Define and implement various consistency notions for MWCSPs • Lower bound by costs estimations • Upper bound by duality principle • Strengthening lower & upper bound estimation functions: • Adopting projection/extension conditions in WCSP consistencies • Discussions on our solving techniques on the two other stronger solutions
Related Work • Related CSP frameworks tackling adversaries: • Stochastic CSPs [Walsh, 2002] • Adversarial CSPs [Brown et al., 2004] • QCSP+/QCOP+ [Benedetti et al., 2007] [Benedetti et. al, 2008] • Other related frameworks: • Bi-level Programming • Plausibility-Feasibility-Utility framework [Pralet et al., 2009]
Future Work • Consistency algorithms: • High-arity Soft Table Constraints, and • Global Soft Constraints • Theoretical comparisons on different consistency notions • Algorithms tackling stronger solutions • Online & Distributed Algorithms • Value ordering heuristics • ICTAI 2012
Performance Evaluation Graph Coloring Game [Lee et al.,2011] • Two player zero-sum games • Writing numbers of nodes • (v,c,d): (# of vertices, # allowed numbers, edge density) • Turns: • Odd/Even numbered turns - Player 1/Player 2 → A series of alternating quantifiers • Time limit: 900s • Similar results
Performance Evaluation Generalized Radio Link Frequency Assignment • Designed according to two CELAR sub-instances • Minimize interference beforehand • (i,n,d,r): (CELAR sub-instance index, # of links, # of allowed frequencies, ratio of adversary links) • Time limit: 7200s • Projection/extension in FDAC* • Slightly improves the search only • Quantifier info. not considered
Algorithms for Stronger Sol. • Solution Size • Ultra-weak: O(n) • Weak: O((n - m)dm) • Strong: O(dn) • Where: • # of variables: n • # of adversary variables: m • Maximum domain size: d • Ultra-weak solutions are linear
Algorithms for Stronger Sol. • Pruning Conditions • A sound pruning condition when solving a weaker solution may not hold in stronger ones • Reason: • Removal of the assumption of optimal/perfect plays • Invalid: • When finding weak solutions • Adversary max player • Invalid: • When finding weak solutions • Adversary min player Theorem: For the set S of sub-problems P ’, where vi is assigned to xi: ∀P ’ ∈ S, A-cost(P ’) ≥ ub(Condition 1), or ∀P ’ ∈ S, A-cost(P ’) ≤ lb(Condition 2) We can prune or backtrack according to the table:
Relations with complexity classes • Weighted CSPs: • NP-hard • Quantified CSPs: • PSPACE-complete Theorem: • Finding the truthfulness of QCSPs can be reduced (by Karp reduction) to finding the A-Cost of MWCSPs →MWCSPs: • PSPACE-hard Assumption: P ≠ PSPACE
Transforming MWCSP to QCOP • Theorem: • An MWCSP P can be transformed into a QCOP P’. The A-cost of P can be found by solving the optimal strategy of P’. • Proof (Sketch): • Using ‘Soft As Hard’ approach [Petit et. al, 2001] • Transform soft constraints into hard constraints
Graph Coloring Game (GCG) Owned by B Owned by A Maximize costs Owned by A Minimize costs Owned by B Player A Player B Owned by B Owned by A Owned by A Owned by B How do they play the game?
Graph Coloring Game 5/B 6/A Write number 3 on node 1 Write number 6 on node 2 2/B 1/A Player A Player B 6 3 8/A 7/B 3/A 4/B Game Cost:|3-6|=3
Graph Coloring Game 5/B 6/A 2/B 1/A Maximize costs 6 3 Place 0 Gain a cost of 3 Place 3 No cost gain Player A What should I do? 8/A 7/B so on… 3/A 4/B
Graph Coloring Game 5/B 6/A When the game terminates… 5 2 1/A 2/B 3 6 What we want to study… 9 1 8/A 7/B 0 5 3/A 4/B Final Game Cost: 55
5/B 6/A Approach 1: 1/A 2/B 8/A 7/B 3/A 4/B so on… 6/A 6/A 0 0 0 6/A 1/A 1/A 1/A 0 0 0 Modeled and solved by COP/ Weighted CSP Modeled and solved by COP/ Weighted CSP Modeled and solved by COP/ Weighted CSP 1 0 1 8/A 8/A 8/A 1 0 0 3/A 3/A 3/A
Modeling GCG Approach 2: 5/B 6/A 1/A 2/B 7/B 8/A 3/A 4/B • Guess a threshold: 56 • Generate a Quantified CSP [Bordeaux and Monfroy, 2002] which asks: • Can player A finds numbers against player B’s moves • s.t. Player A gets costs < 56?
Modeling GCG • Approach 1: • Number of COPs/ Weighted CSPs constructed is exponential to the possible numbers player B can write • Approach 2: • Generate Quantified CSPs based on the objective function
NC Q3 = max Q1 = max Q2 = min AC Merge Q3 = max Q1 = max Q2 = min