Acknowledgments
Acknowledgments. We would like to thank the following organizations and individuals for their help in this endeavor. Whether your contribution was funding, materials, lab space, skills, or good advice, our team is grateful to you. Exxon-Mobil MIT Department of Ocean Engineering MIT Sea Grant

Acknowledgments
E N D
Presentation Transcript
Acknowledgments We would like to thank the following organizations and individuals for their help in this endeavor. Whether your contribution was funding, materials, lab space, skills, or good advice, our team is grateful to you. Exxon-Mobil MIT Department of Ocean Engineering MIT Sea Grant The Edgerton Center Fred Cote and the Edgerton Student Shop The Ocean Engineering Teaching Lab Cape Shores Welding Analog Devices Bluefin Robotics Marine Advanced Technology Education Center
Team Members Members: B. Brett, H. Brundage, S. Clark, L. Cooney, J. Downey, H. Lichter, B. Myhre, T. Pennington, M. J. Stanway, T. Stefanov-Wagner, K. Stiehl, D. Walker Mentors: Dr. F. Hover, Dr. T. Consi
Most Rewarding Aspect The most rewarding aspect of this year’s competition was gaining experience in integrating so many different subsystems, from different developmental groups, into a complete vehicle. This was very difficult in some cases, because there were unexpected issues that didn’t present themselves until the last minute. We learned that inter-group communication was very important, so we spent the first part of every meeting updating the entire team on progress in each subgroup. This went a long way toward involving all members of the team in the creative problem-solving process.
What Would We Do Differently? One of the things we learned when we had to change control systems was that our design was not as modular as we had previously thought; the new system needed a larger housing, which did not fit into the frame without modification. When developing prototype system, it is important to be able to replace components and move then around easily. In hindsight, our job would have been much easier building around a central spine, using something like 80-20. It would have also been very advantageous to have approached the problem more like designing an independent, fully-functioning ROV, and then incorporating specialized systems into a dedicated payload space. Finally, anywhere that o-rings cannot readily be used to create a seal, the housing should be re-designed so that they can.
ROV Use Today ROVs are used in National Marine Sanctuaries (NMS) for a variety of missions, including scientific sampling, archaeological surveying, conservation, exploration, and education. During the NOAA Ocean Explorer Sanctuary quest, ROVs investigated submerged cultural resources while characterizing habitats of a chain of sanctuaries along the west coast of the US. In the Stellwagen Bank National Marine Sanctuary, ROVs were used to positively identify the shipwreck of the Portland. Though the wreck was initially found by side scan sonar, high quality video from ROV missions was needed to identify distinctive characteristics of the ship, such as the rudder assembly, paddle guard, and steam release vent. In an effort to promote public awareness, the Thunder Bay NMS webcast a recent expedition to explore the wreck of the Montana. The video of divers conducting the survey, filmed by a Phantom III ROV, was broadcast to many locations, including the American School for the Deaf.
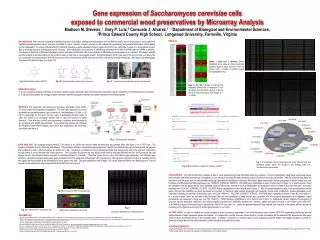
Fluid Collection • In an effort to keep the system as simple as possible, thereby minimizing the probability of malfunction, the sample is collected through a funnel into a flexible bladder fed by a submersible pump (Rule 500 Automatic Pump 25S). This gives us many advantages: • little energy is required since the flexible bladder allows for equal pressure inside and outside of the system • buoyancy is not altered by sample collection • funnel allows for easier mating with barrel mock-up • We came across challenges in obtaining an un-diluted sample, since the pump must initially be filled with liquid. To purge this water, a ‘dummy’ bladder was incorporated into the system (across from the pump in a t-junction) along with the actual collection bladder (off the side of the t-junction). This causes the dummy bladder to fill first with the diluted sample, allowing a pure sample to be collected in the collection bladder. Fluid sample schematic. Sampling system mounted
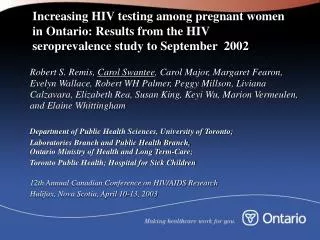
Length Measurement Geometry of length measurment
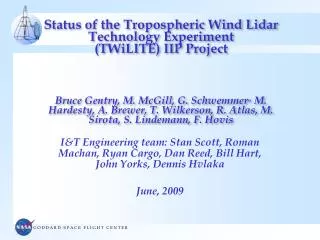
Recovery Gripper assembly and gearing. To retrieve all three objects, the ROV is equipped with two identical grippers. The vertical gripper is used to grab the towfish at the center of its length, requiring less accuracy in piloting than trying to latch onto the U-bolt. The horizontal gripper is used to grab the pinger and the loop of the bell. Though multiple trips may be required, this method was determined to be the simplest and quickest. Each gripper has three fingers attached to a central gearbox that uses a worm drive mechanism to move the fingers in opposite directions. The three fingers are semicircular, shaped to fit around a 2” PVC pipe (what both the towfish and pinger are made out of) and arranged to overlap when closing, thereby requiring little holding torque.
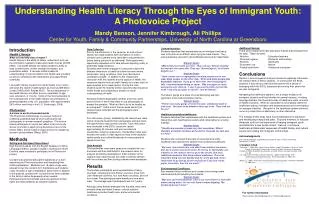
Temperature and Depth Temperature and depth sensor package. Temperature will be determined using a resistance temperature detector (OMEGA PR11 RTD). The instrument did not come with circuitry, so it was wired into a Wheatstone bridge to negate part of its background resistance. The signal is routed through an amplifier and into the vehicle’s bottom side computer. Depth will be measured with a strain gauge (Measurement Specialties, Inc. MSP 600). This particular sensor was chosen for its high sensitivity and resolution, allowing determination of depth to within 5 cm. We did not believe that we could construct our own sensor with this accuracy. Both of these sensors have linear output, so they will be calibrated using two known points and a fitted line.
Whole System Frame: Thrusters: Cameras: Control System:
MIT Team