Download
1 / 84
840 likes | 873 Vues
This resource covers various system models including spring-mass-damper, RLC circuits, control systems, and epidemic spread. Explore block diagrams, flow graphs, state models, and response analysis techniques for understanding and designing dynamic systems. The examples range from mechanical systems like cart dynamics and inverted pendulums to electrical circuits and control system components. Gain insights into state-space representations, response analysis, and control system design processes. Learn about multi-loop feedback control and modeling of complex dynamic systems.

E N D
Figure 3.5 Two rolling carts attached with springs and dampers.
Figure 3.6 Free-body diagrams of the two rolling carts. (a) Cart 2; (b) Cart 1.
Figure 3.7 Initial condition response of the two cart system.
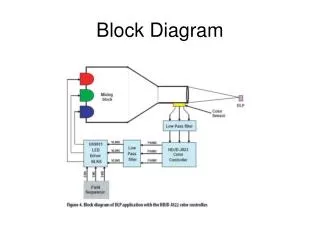
Figure 3.8RLC network. (a) Signal-flow graph. (b) Block diagram.
Figure 3.9 Flow graph nodes and integrators for fourth-order system.
Figure 3.10 Model for G(s) of Equation (3.45). (a) Signal-flow graph. (b) Block diagram.
Figure 3.11 Model for G(s) of Equation (3.46) in the phase variable format. (a) Signal-flow graph. (b) Block diagram.
Figure 3.13 (a) Alternative flow graph state model for Equation (3.46). This model is called the input feedforward canonical form. (b) Block diagram of the input feedforward canonical form.
Figure 3.15 (a) Phase variable flow graph state model for T(s). (b) Block diagram for the phase variable canonical form.
Figure 3.16 (a) Alternative flow graph state model for T(s) using the input feedforward canonical form. (b) Block diagram model.
Figure 3.17 A block diagram model of an open-loop DC motor control with velocity as the output.
Figure 3.18 (a) The physical state variable signal-flow graph for the block diagram of Figure 3.17. (b) Physical state block diagram.
Figure 3.19 (a) The decoupled state variable flow graph model for the system shown in block diagram form in Figure 3.17. (b) The decoupled state variable block diagram model.
Figure 3.20 Model for the spread of an epidemic disease. (a) Signal-flow graph. (b) Block diagram model.
Figure 3.21 An inverted pendulum balanced on a person’s hand by moving the hand to reduce Ө(t). Assume, for ease, that the pendulum rotates in the x–y plane.
Figure 3.22 A cart and an inverted pendulum. The pendulum is constrained to pivot in the vertical plane.
Figure 3.25 Time response of the state variables of the RLC network for x1(0) = x2(0) = 1.
Figure 3.26 Trajectory of the state vector in the (x1, x2)-plane.
Figure 3.27 An artist’s conception of the International Space Station. (Courtesy of NASA.)
Figure 3.28 Elements of the control system design process emphasized in the spacecraft control example.
Figure 3.31 Printer belt drive. (a) Signal-flow graph. (b) Block diagram model.
Figure 3.33 Response of x1(t) to a step disturbance: peak value = -0.0325.
Figure 3.34 (a) The ss function. (b) Linear system model conversion.
Figure 3.35 Conversion of Equation (3.115) to a state-space representation. (a) m-file script. (b) Output printout.
Figure 3.36 Block diagram with x1 defined as the leftmost state variable.
Figure 3.37 Computing the state transition matrix for a given time, ∆t = dt.
Figure 3.38 The Isim function for calculating the output and state response.
Figure 3.39 Computing the time response for nonzero initial conditions and zero input using Isim.
Figure 3.40 a) Model of the two-mass system with a spring flexure. (b) Simplified model with a rigid spring.
Figure 3.41 Transfer function model of head reader device with a rigid spring.
Figure 3.42 Response of y for a step input for the two-mass model with k = 10.