Download
1 / 1
10 likes | 122 Vues
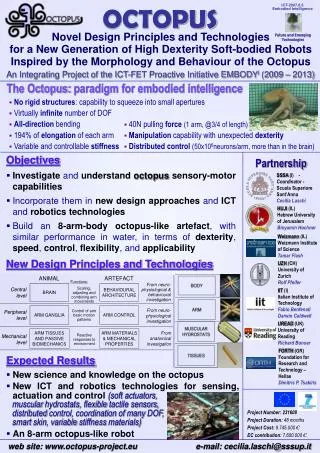
This project explores the design and development of high dexterity soft-bodied robots inspired by octopus morphology and behavior. By emulating the octopus's unique sensory-motor capabilities, the project aims to create an eight-arm robotic system capable of exceptional manipulation, flexibility, and control. Key features include variable stiffness, all-direction bending, and distributed control mimicking the octopus's neural architecture. Collaborating institutions include Scuola Superiore Sant'Anna, Hebrew University of Jerusalem, and Weizmann Institute of Science.

E N D
ICT-2007.8.5 Embodied Intelligence OCTOPUS Novel Design Principles and Technologies for a New Generation of High Dexterity Soft-bodied Robots Inspired by the Morphology and Behaviour of the Octopus An Integrating Project of the ICT-FET Proactive Initiative EMBODYi (2009 – 2013) • The Octopus: paradigm for embodied intelligence • No rigid structures: capability to squeeze into small apertures • Virtually infinite number of DOF • All-direction bending • 194% of elongation of each arm • Variable and controllable stiffness • 40N pulling force(1 arm, @3/4 of length) • Manipulation capability with unexpected dexterity • Distributed control(50x106neurons/arm, more than in the brain) Objectives • Investigateandunderstandoctopus sensory-motor capabilities • Incorporate them in new design approaches and ICT and robotics technologies • Build an 8-arm-body octopus-like artefact, with similar performance in water, in terms of dexterity,speed,control,flexibility, andapplicability Partnership SSSA (I) - Coordinator - Scuola Superiore Sant’Anna Cecilia Laschi HUJI (IL) Hebrew University of Jerusalem Binyamin Hochner Weizmann (IL) Weizmann Institute of Science Tamar Flash New Design Principles and Technologies UZH (CH) University of Zurich Rolf Pfeifer IIT (I) Italian Institute of Technology Fabio Benfenati Darwin Caldwell UREAD (UK) University of Reading Richard Bonser FORTH (GR) Foundation for Research and Technology – Hellas Dimitris P. Tsakiris Expected Results • New science and knowledge on the octopus • New ICT and robotics technologies for sensing, actuation and control (soft actuators, muscular hydrostats, flexible tactile sensors, distributed control, coordination of many DOF, smart skin, variable stiffness materials) • An 8-arm octopus-like robot Project Number: 231608 Project Duration: 48 months Project Cost: 9.745.000 € EC contribution: 7.600.000 € web site: www.octopus-project.eu e-mail: cecilia.laschi@sssup.it