ÖDEV 6 ÇÖZÜMLERİ
150 likes | 330 Vues
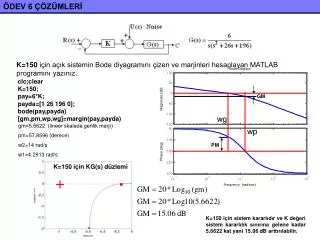
ÖDEV 6 ÇÖZÜMLERİ. wg. wp. K=150 için KG(s) düzlemi. K=150 için açık sistemin Bode diyagramını çizen ve marjinleri hesaplayan MATLAB programını yazınız. clc;clear K=150; pay=6*K; payda=[1 26 196 0]; bode(pay,payda) [gm,pm,wp,wg]=margin(pay,payda).

ÖDEV 6 ÇÖZÜMLERİ
E N D
Presentation Transcript
ÖDEV 6 ÇÖZÜMLERİ wg wp K=150 için KG(s) düzlemi K=150 için açık sistemin Bode diyagramını çizen ve marjinleri hesaplayan MATLAB programını yazınız. clc;clear K=150; pay=6*K; payda=[1 26 196 0]; bode(pay,payda) [gm,pm,wp,wg]=margin(pay,payda) gm=5.6622 (lineer skalada genlik marjı) pm=57.8596 (derece) w2=14 rad/s w1=4.2913 rad/s K=150 için sistem kararlıdır ve K değeri sistem kararlılık sınırına gelene kadar 5.6622 kat yani 15.06 dB arttırılabilir.
ÖDEV 6 ÇÖZÜMLERİ K=849.33 için KG(s) düzlemi Buna göre kritik kazanç değeri Kcr veya
ÖDEV 6 ÇÖZÜMLERİ K=425.67 için GM=6 dB -6 -156.8413° PM=23.1587° Kazanç Marjı GM=6 dB olacak şekilde K kazancını belirleyelim. K=Kcr’de Kazanç Marjı GM=0 dB’dir. GM=6 dB olabilmesi için K değeri Kcr’den 6 dB düşük olmalıdır. Veya K=150 için GM=15.06 dB idi. GM=6 dB yeterli ise K kazancı 15.06-6 =9.06 dB daha arttırılabilir. Bu durumda
ÖDEV 6 ÇÖZÜMLERİ K=425.67 için kapalı sistemin adım girdiye cevabında aşma değerini yaklaşık olarak bulunuz K=425.67 için faz marjı PM=23.1587° dir. Buna göre sönüm oranı clc;clear K=425.67; pay=6*K; payda=[1 26 196 6*K]; sys=tf(pay,payda); [c,t]=step(sys); plot(t,c) overs=max(c)-c(length(c)) Aşma = %51
ÖDEV 6 ÇÖZÜMLERİ Kapalı sistemin sönüm oranını % 65 yapmak için kazanç devresine ardışık nasıl bir kontrol devresi uygulanmalıdır? Bu devrede C= 1μF ise R1 ve R2 değerlerini belirleyiniz. Sönüm oranını ξ=0.65 yapmak için faz ekle devresi kullanırız. Eklenecek faz 65°-23.16°=41.84° dir. Genlik kesim frekansı (genliğin 0 dB olduğu frekans) w1=9.49 rad/s olduğu için bu frekansta faz eklenecektir (faz marjının okunduğu frekans). Buradan 41.84º 9.49 rad/s Görüldüğü gibi Faz Ekle devresi 9.49 rad/s’de sistemin faz marjını 41.84º arttırıyor.
ÖDEV 6 ÇÖZÜMLERİ a) K=60 için açık sistemin Bode diyagramını çizen ve marjinleri hesaplayan program. clc;clear K=60; pay=K; payda=conv(conv([1,3],[1,3]),conv([1,3],[1,1])); bode(pay,payda) [gm,pm,w2,w1]=margin(pay,payda) -7.24 dB Genlik Marjı gm=2.3040 (lineer skalada genlik marjı) pm=53.6062 (derece) w2=2.3238 rad/s w1=1.3535 rad/s Faz Marjı K=60 için KG(s) düzlemi GM=20*log10(2.3040)=7.25 dB K=60 için sistem kararlıdır ve K değeri sistem kararlılık sınırına gelene kadar 2.3040 kat yani 7.24 dB arttırılabilir.
ÖDEV 6 ÇÖZÜMLERİ K=138.24 için KG(s) düzlemi GM=0 PM=0 Buna göre kritik kazanç değeri Kcr veya
ÖDEV 6 ÇÖZÜMLERİ K=150 için K=150 için KG(s) düzlemi Kararsız Kararsız Kazanç Marjı GM=6.2 dB olacak şekilde K kazancını belirleyelim. Veya K=60 için GM=7.25 dB idi. GM=6.2 dB yeterli ise K kazancı 7.25-6.2 =1.05 dB daha arttırılabilir. Bu durumda olarak bulunabilir.
ÖRNEK FAZ EKLE-ÇIKAR C(s) R(s) + 15 - >>pay=[15 30]; >>payda=[4 6 7 -10]; >>bode(pay,payda) Adım Girdi Cevabı 1.5 Örnek: css’e göre aşma değeri
ÖRNEK FAZ EKLE-ÇIKAR Overshoot’u azaltmak için sönüm ilavesi amaçlı faz ekle devresi tasarlayalım. İlk durumda ξ≈PM/100=14.4562/100=0.1445. Sönüm oranını 0.3 yapmak için φ=30-PM=30-14.4562=15.5438 derece faz ekleyelim. Faz ekleme frekansı Faz marjininin ölçüldüğü frekansdır ω=2.1209 rad/s. 15.5438º >>pay=[0.6206 1]; >>payda=[0.3583 1]; >>bode(pay,payda) 2.1209 rad/s Görüldüğü gibi Faz Ekle devresi 2.1209 rad/s’de sistemin faz marjını 15.5438º arttırıyor.
ÖRNEK FAZ EKLE-ÇIKAR R(s) + C(s) 15 - Faz Ekle 1.5 >>pay=[9.309 33.618 30]; >>payda=[1.4332 6.1498 17.8171 37.035 20]; >> step(pay,payda) Overshoot azaldı! ess =0.5 değişmedi! css’e göre aşma değeri FAZ EKLE DEVRESİ TÜREVSEL KONTROLCÜYE BENZER BİR ETKİ OLUŞTURDU.
ÖRNEK FAZ EKLE-ÇIKAR -8° Düzenli rejim hatasını azaltabilmek amacı ile ilk sisteme faz azalt devresi ekleyelim. İlk durumda faz marjı PM=14.4562° idi. Sistemin stabilitesini bozmadan 8° faz azaltalım. 2.1209 rad/s Görüldüğü gibi Faz Azalt devresi 2.1209 rad/s’de sistemin Faz marjını -8º azaltıyor.
ÖRNEK FAZ EKLE-ÇIKAR R(s) + C(s) 15 - Faz Azalt clc;clear pay=[8.136 36.1215 39.699]; payda=[2.1696 7.2544 17.9328 37.6975 29.699]; syst=tf(pay,payda); [c,t]=step(syst) Düzenli rejim hatası ess azaldı! Overshoot arttı! Düzenli rejime ulaşma zamanı arttı! FAZ AZALT DEVRESİ INTEGRAL KONTROLCÜYE BENZER BİR ETKİ OLUŞTURDU. FAZ EKLE VE FAZ AZALT DEVRERELERİNİN BİRLİKTE KULLANILMASIYLA İSTENİLEN ÇIKTI ELDE EDİLEBİLİR. css’e göre aşma değeri