Understanding Univariate Time Series: Stationarity, Processes, and Estimation
520 likes | 658 Vues
Dive into univariate time series analysis focusing on stationarity, AR and MA processes, and estimation techniques like OLS. Learn the properties of different processes, conditions for stationarity, and how to handle initial conditions in modeling.

Understanding Univariate Time Series: Stationarity, Processes, and Estimation
E N D
Presentation Transcript
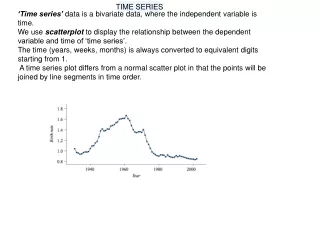
Concerned with time series properties of single series • Denote yt to be observed value in period t • Observations run from 1 to T • Very likely that observations at different points in time are correlated as economic time series change only slowly
Stationarity • Properties of estimators depend on whether series is stationary or not • Time series yt is stationary if its probability density function does not depend on time i.e. pdf of (ys,ys+1,ys+2,..ys+t ) does not depend on s • Implies: • E(yt) does not depend on t • Var(yt) does not depend on t • Cov(yt,yt+s) depends on s and not t
Weak Stationarity • A series has weak stationarity if first and second moments do not depend on t • Stationarity implies weak stationarity but converse not necessarily true • Will be the case for most cases you will see • I will focus on weak stationarity when ‘proving’ stationarity
Simplest Stationary Process • Where εt is ‘white noise’ – iid with mean 0 and variance σ2 • Simple to check that: • E(yt)=α0 • Var(yt)= σ2 • Cov(yt,yt-s)=0 • Implies yt is ‘white noise’ – unlikely for most economic time series
When is AR(1) stationary? • Take expectations: • If stationary then can write this as: • Only ‘makes sense’ if α1<1
Look at Variance • If stationary then: • Only ‘makes sense’ if |α1 |<1 – this is the condition for stationarity of AR(1) process • If α1 =1 then this is random walk – without drift if α0 =0, with drift otherwise – variance grows over time
What about covariances? • Define • Then can write model as:
Higher-Order Covariances • Or, in terms of correlation coefficient: • General rule is:
More General Auto-Regressive Processes • AR(p) can be written as: • This is stationary if root of p-th order polynomial are all inside unit circle: • Necessary condition is:
Why is this condition necessary? • Think of taking expectations: • If stationary, expectations must all be equal: • Only ‘makes sense’ if coefficients sum to <1
Moving-Average Processes • Most common alternative to an AR process – MA(1) can be written as: • MA process will always be stationary – can see weak stationarity from:
Stationarity of MA Process • And further covariances are zero
MA(q) Process • Will always be stationary • Covariances between two observations zero if more than q periods apart
Relationship between AR and MA Processes • Might seem unrelated but connection between the two • Consider AR(1) with α0=0: • Substitute yt-1 to give:
Do Repeated Substitution… • AR(1) can be written as an MA(∞) with geometrically declining weights • Need stationarity for final term to disappear
A quicker way to get this…the lag operator • Define the lag operator: • Can write AR(1) as:
Should recognize denominator as sum of geometric series so… • Which is the same as we had by repeated substitution
For a general AR(p) process • If α(L) invertible we have: • So invertible AR(p) can be written as particular MA(∞)
From an MA to an AR Process • Can use lag operator to write MA(q) as: • If θ(L) invertible: • So MA(q) can be written as particular AR(∞)
ARMA Processes • Time series might have both AR and MA components • ARMA(p,q) can be written as:
Estimation of AR Models • Simple-minded approach would be to run regression of y on p lags of y and use OLS estimates • Lets consider properties of this estimator – simplest to start with AR(1) • Assume y0 is available
The OLS estimator of the AR Coefficient • Want to answer questions about bias, consistency, variance etc • Have to regard ‘regressor’ as stochastic as lagged value of dependent variable
Bias in OLS Estimate • Can’t derive explicit expression for bias • But OLS estimate is biased and bias is negative • Different from case where x independent of every ε • Easiest way to see the problem is consider expectation of numerator in second term:
First part has expectation zero but second part can be written as: • These terms are not zero as yt can be written as function of lagged εt • All these correlations are positive so this will be positive and bias will be negative • This bias often called Hurwicz bias – can be sizeable in small samples
But….. • Hurwicz bias goes to zero as T→∞ • Can show that OLS estimate is consistent • What about asymptotic distribution of OLS estimator? • Depends on whether yt is stationary or not
If time series is stationary • OLS estimator is asymptotically normal with usual formulae for asymptotic variance e.g. for AR(1): • Can write this as:
The Initial Conditions Problem • To estimate AR(p) model by OLS does not use information contained in first p observations • Loss of efficiency from this • Number of methods for using this information – will describe ML method for AR(1)
ML Estimation of AR(1) Process • Need to write down likelihood function – probability of outcome given parameters • Can always factorize joint density as: • With AR(1) only first lag is any use:
Assume εt has normal distribution • Then yt t>1, is normally distributed with mean (α0+α1yt-1) and variance σ2 • y0 is normally distributed with mean (α0/(1-α1)) and variance σ2(1-α12) • Hence likelihood function can be written as:
Comparison of ML and OLS Estimators • Maximization of first part leads to OLS estimate – you should know this • Initial condition will cause some deviation from OLS estimate • Effect likely to be small if T reasonably large
Estimation of MA Processes • MA(1) process looks simple but estimation surprisingly complicated • To do it ‘properly’ requires Kalman Filter • ‘Dirty’ Method assumes ε0=0 • Then repeated iteration leads to:
Can then end up with.. • And maximize with respect to parameters • Packages like STATA, EVIEWS have modules for estimating MA processes
Deterministic Trends • Restriction to stationary processes very limiting as many economic time series have clear trends in them • But results can be modified if deterministic trend as series stationary about this
Non-Stationary Series • Will focus attention on random walk • Note that conditional on some initial value y0 we have:
Terminologies… • These formulae should make clear non-stationarity of random walk • Different terminologies used to describe non-stationary series: • yt is a random walk • yt has a stochastic trend • yt is I(1) – integrated of order 1 -Δyt is stationary • yt has a unit root • All mean the same
Problems Caused by Unit Roots - Bias • Autoregressive Coefficients biased towards zero • Same problem as for stationary AR process – but problem bigger • But bias goes to zero as T→∞ so consistent
Problems Caused by Unit Roots – Non-Normal Asymptotic Distribution • Asymptotic distribution of OLS estimator is • Non-normal • Shifted to the left of true value (1) • Long left tail • Convergence relates to: • Cannot assume t-statistic has normal distribution in large samples
Testing for a Unit Root – the Basics • Interested in H0:α1=1 against H1:α1<1 • Use t-statistic but do not use normal tables for confidence intervals etc • Have to use Dickey-Fuller Tables – called the Dickey-Fuller Test
Implementing the Dickey-Fuller Test • Want to test H0:β1=0 against H1: β1<0 • Estimate by OLS and form t-statistic in usual way • But use t-statistic in different way: • Interested in one-tail test • Distribution not ‘normal’
Critical Values for the Dickey-Fuller Test • Typically larger than for normal distribution (long left tail) • Critical values differ according to: • the sample size (typically small sample critical values are based on the assumption of normally distributed errors) • whether constant is included in the regression or not • Whether a trend is included in the regression or not • the order of the AR process that is being estimated • Reflects fact that distribution of t-statistic varies with all these things • Most common cases have been worked out and tabulated – often embedded in packages like STATA, EVIEWS
The Augmented Dickey-Fuller Test • Critical values for unit root test depend on order of AR process • DF test for AR(p) often called ADF Test • Model and hypothesis is:
The easiest way to implement • Can always re-write AR(p) process as: • i.e. regression of Δyt on (p-1) lags inΔyt and yt-1 • Test hypothesis that coefficient on is zero against alternative it is less than zero
ARIMA Processes • One implication of above is that AR(p) process with a unit root can always be written as AR(p-1) process in differences • Such processes are often called auto-regressive integrated moving average processes ARIMA(p,d,q) where the d refers to how many times the data is differenced before it is an ARMA(p,q)
Some Caution about Unit Root Tests • Unit root test has null hypothesis that series is non-stationary • This is because null of stationarity not well-defined • accepting hypothesis of unit root implies data consistent with non-stationarity – but may also be consistent with stationarity • economic theory may often provide guidance
Structural Breaks • Suppose series looks like: