Introduction to Attitude Control Systems
Introduction to Attitude Control Systems. MAE 155A. Determination & Attitude Control Systems (DACS). Introduction DACS Basics Attitude Determination and Representation Basic Feedback Systems Stabilization Approaches. Determination & Attitude Control Systems (DACS).

Introduction to Attitude Control Systems
E N D
Presentation Transcript
Introduction to Attitude Control Systems MAE 155A GN/MAE155A
Determination & Attitude Control Systems (DACS) • Introduction • DACS Basics • Attitude Determination and Representation • Basic Feedback Systems • Stabilization Approaches GN/MAE155A
Determination & Attitude Control Systems (DACS) • Control of SC orientation: Yaw, Pitch, Roll • 3 Components to DACS: • Sensor: Measure SC attitude • Control Law: Calculate Response • Actuator: Response (Torque) • Example: Hubble reqts 2x10-6 deg pointing accuracy => equivalent to thickness of human hair about a mile away! GN/MAE155A
Determination & Attitude Control Systems (DACS) • Introduction • DACS Basics • Attitude Determination and Representation • Basic Feedback Systems • Stabilization Approaches GN/MAE155A
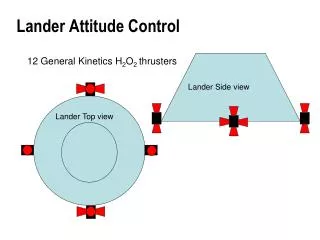
S/C Correction Attitude Errors Sensors Gyros Horizon Sensors Sun Sensors Torquers Thrusters Reaction Wheels Momentum Wheels CMGs Computer Control Law DACS Basics GN/MAE155A
Determination & Attitude Control Systems (DACS) • Spinning Spacecraftprovide simple pointingcontrol along single axis(low accuracy) • Three axis stabilityprovides high accuracypointing control in anydirection GN/MAE155A
DACS Design • Considerations: • Mission Reqts • Disturbance Calcs • DACS System Design GN/MAE155A
DACS Reqts Definition • Summarize mission pointing reqts • Earth (Nadir), Scanning, Inertial • Mission & PL Pointing accuracy • Note that pointing accuracy is influenced by all 3 DACS components • Pointing accuracy can range from < 0.001 to 5 degrees • Define Rotational and translational reqts for mission: Magnitude, rate and frequency • Calculate expected torque disturbances • Select ACS type; Select HW & SW • Iterate/improve as necessary GN/MAE155A
Torque Disturbances • External • Gravity gradient: Variable g force on SC • Solar Pressure: Moment arm from cg to solar c.p. • Magnetic: Earth magnetic field effects • Aero. Drag: Moment arm from cg to aero center • Internal • Appendage motion, pointing motors- misalign, slosh • Cyclic and secular • Cyclic: varies in sinusoidal manner during orbit • Secular: Accumulates with time GN/MAE155A
Determination & Attitude Control Systems (DACS) • Introduction • DACS Basics • Attitude Determination and Representation • Basic Feedback Systems • Stabilization Approaches GN/MAE155A
SC Attitude Determination Fundamentals • Attitude determination involves estimating the orientation of the SC wrt a reference frame (usually inertial or geocentric), the process involves: • Determining SC body reference frame location from sensor measurements • Calculating instantaneous attitude wrt reference frame • Using attitude measurement to correct SC pointing using actuators (or torquers) GN/MAE155A
Basic SC Attitude Determination Sensor Data State Estimation Attitude Calculation • Batch Estimators • Least Squares • Kalman Filtering • Gyros • Star/Sun Sensor • Magnetometer • Euler Angles • DCM • Quaternions Control Law Used to Determine Required Correction GN/MAE155A
Attitude Sensors • Performance requirements based on mission • Weight, power and performance trades performed to select optimal sensor • Multiple sensors may be used GN/MAE155A
State Estimation Approaches • Estimate SC orientation using data measurements • Estimates typically improve as more data are collected (assuming no ‘jerk motion’) • Estimation theory and statistical methods are used to obtain best values • Least squares and Kalman filtering are most common approaches • Least squares minimizes square of error (assumes Gaussian error distribution) • Kalman filter minimizes variance GN/MAE155A
SC Attitude Representation • SC frame of reference typically points SC Z axis anti-Nadir, and X axis in direction of velocity vector • Relationship between SC and inertial reference frame can be defined by the 3 Euler angles (Yaw, Pitch and Roll) • Note that both magnitude and sequence of rotation affect transformation between SC and inertial reference frame GN/MAE155A
SC Attitude Representation Using Euler Rotation Angles • The Direction Cosine Matrix (DCM) is the product of the 3 Euler rotations in the appropriate sequence (Yaw-Pitch-Roll) DCM ~ R = R1 * R2 * R3 Ref: Brown, Elements of SC Design GN/MAE155A
Direction Cosine Rotation Matrix The DCM is given by: Note that each transformation requires substantial arithmetic and trigonometric operations, rendering it computationally intensive An alternative, and less computationally intensive, approach to using DCM involves the use of Quaternions Ref: Brown, Elements of SC Design GN/MAE155A
Quaternion Definition • Euler’s theorem states that any series of rotation of a rigid body can be represented as a single rotation about a fixed axis • Orientation of a body axis can be defined by a vector and a rotation about that vector • A quaternion, Q, defines the body axis vector and the scalar rotation => 4 elements • Q = i.q1 + j.q2 + k.q3 + q4 , wherei2 = j2 = k2 = -1 GN/MAE155A
Basic Quaternion Properties • Given the quaternion Q, where Q = i.q1 + j.q2 + k.q3 + q4 ; we have ij = - ji = k; jk = -kj = i; ki = -ik = j • Two quaternions, Q and P are equal iff all their elements are equal, i.e., q1 =p1 ; q2 =p2 ;q3 =p3 • Quaternion multiplication is order dependent, R=Q*P is given by: R = (i.q1 + j.q2 + k.q3 + q4)*(i.p1 + j.p2 + k.p3 + p4) • The conjugate of Q is given by Q*, whereQ* = -i.q1 - j.q2 - k.q3 + q4 • The inverse of Q, Q-1 = Q* when Q is normalized GN/MAE155A
Basic Quaternion Properties The DCM can be expressed in terms of quaternion elements as: • The quaternion transforming frame A into frame B is given by: • VB = Qab VA (Qab)* • Quaternions can also be combined as: • Qac = Qbc Qab GN/MAE155A
Comparison of 3-Axis Attitude Representation Ref: Brown, Elements of SC Design GN/MAE155A
Determination & Attitude Control Systems (DACS) • Introduction • DACS Basics • Attitude Determination and Representation • Basic Feedback Systems • Stabilization Approaches GN/MAE155A
Feedback Loop Systems • The control loop can use either an open or closed system. Open loop is used when low accuracy is sufficient, e.g., pointing of solar arrays. • Generic closed-loop system: Disturbance e =r +a Control Law, Actuators Spacecraft Dynamics Output Reference Error r a a Ref: Brown, Elements of SC Design GN/MAE155A
Basic Rotation Equations Review Angular displacement: = 1/2 t2 = d /dt(note ‘burn’ vs. maneuvering time) Angular speed: = t Angular acceleration: = T/IvAngular Momentum: H = Iv => H = T t Where, ~ rotation angle; ~ angular acceleration T ~ torque; Iv ~ SC moment of Inertia H ~ Angular Momentum; ~angular speed GN/MAE155A
Basic Rotation Equations Review Torque equations: T = dH/dt = Iv d /dt = Iv d2 / dt2(Iv assumed constant)Note that the above equations are scalar representations of their vector forms (3D) Hx Hy Spin axis precession GN/MAE155A
Determination & Attitude Control Systems (DACS) • Introduction • DACS Basics • Attitude Determination and Representation • Basic Feedback Systems • Stabilization Approaches GN/MAE155A
Spin Stabilized Systems • Spinning SC (spinner): resists disturbance toques (gyroscopic effect) • Disturbance along H vector affects spin rate • Disturbance perp. to H => Precession • Adv: Low cost, simple, no propel mgmt • Disadv:- Low pointing accuracy (> 0.3 deg) - I about spinning axis >> other I - Limited maneuvering, pointing • Dual spin systems: major part of SC spins while a platform (instruments) is despun GN/MAE155A
SC Stabilization Systems F2 - Gravity Gradient (G2) Systems (passive): Takes adv of SC tendency to align its long axis along g vector, g = GM/r; r1<r2 => F1>F2 => Restoring Torque -Momentum Bias: Use momentum wheel to provide inertial stiffness in 2 axes, wheel speed provides control in 3rd axis r2 F1 r1 Stability condition: Ir r > (Ixx-Iyy) y Pitch axis (y) wheel V SC Nadir GN/MAE155A
SC Stabilization Systems • Reaction Wheels (RW) • Motor spins a small free rotating wheel aligned w. vehicle control axis (~low RPM) • One wheel per axis needed, however, additional wheels are used for redundancy • RW only store, not remove torques • Counteracting external torque is needed to unload the stored torque, e.g., magnetic or rxn jets (momentum dumping) • Speed of wheel is adjusted to counter torque GN/MAE155A
SC Stabilization Systems • RW at high RPM are termed momentum wheels. • Also provides gyroscopic stability • Magnetic (torque) coils can be used to continuously unload wheel • Wheels provide stability during periods of high torque disturbances • Control Moment Gyro • Gimbaled momentum wheel GN/MAE155A
SC Stabilization Systems (External): • Thrusters: Used to provide torque (external) on SC • Magnetic torque rods • Can be used to provide a controlled external torque on SC • Need to minimize potential residual disturbance torqueT = M x B where M~dipole w. magnetic moment M B~Local Flux density GN/MAE155A
Reaction Wheels Magnetometers Magnetic Torquers GN/MAE155A
DACS Summary GN/MAE155A
Conclusions • Examples • References • Discussion & Questions GN/MAE155A