Brian Erson Attitude Control Systems
70 likes | 164 Vues
Explore the critical requirements and product specifications of Attitude Control Systems (ACS) for Trans-Lunar Phase 1, including torque, pointing accuracy, mass limitations, environmental exposure, and more. Cost breakdown and calculations provided.

Brian Erson Attitude Control Systems
E N D
Presentation Transcript
Brian ErsonAttitude Control Systems Trans Lunar Phase 1 [Brian Erson] [Attitude]
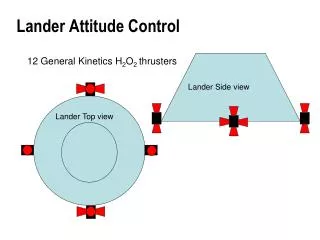
Attitude Control Systems (ACS) Relevant Requirements: • Sum of torques on Craft* • Space environmental torque < 2.4 x10-4 Nm • Thrust misalignment torque < 5.0 x 10-3 Nm • Drift error < 4 x 10-6 Nm • Total < 5.2 x10-3 Nm • Pointing Accuracy < .017 rad • Mass< 35 kg • Environment exposure • Temperature -25 to +55C • Radiation Custom Hardening • Power Requirement < 50 W • Lifetime > 2 years *Assumption of Additive Property 2 [Brian Erson] [Attitude]
Product Specifications Fulfilling Relevant Requirements • Star Sensor • VF STC 1, Valley Forge Composites • Reaction Wheel Assembly • VF MR 0.1, Valley Forge Composites Estimated propellant cost: $5600 Estimated Thruster Cost: $100,000 Total ACS cost: $505,600 [Brian Erson] [Attitude] 3
Backup Slide 1 • Calculation of Thrust Misalignment Torque • Estimate of Thrust at 1 kW ~100 mN • Estimate of Thrust misalignment ~ 0.05 m • Conservative Max Misalignment Torque ~ 5 mNm • Calculation of Drift Error • Tracking error from Reaction wheel spec sheet <1rpm • Operating speed 3000 rpm • Max Wheel Torque 12 mNm • Drift Error = 1/3000 * 12 = 0.004 mNm [Brian Erson] [Attitude] 4
Backup Slide 2 • Calculation of Mass Requirement (Ref, Smart-1 Lunar Probe) • Reaction Wheel assembly ~ 12 kg • Sun Sensors ~ 4 kg • Angular rate sensors ~ 0.3 kg • Star Tracker ~ 3 kg • Total ~ 19.3 kg • ACS/Launch mass: 19.3/380 = .05 = 5% • Conservative estimate of IMTLI: 700 kg * 5% • Conservative estimate of ACS mass < 35 kg 5 [Brian Erson] [Attitude]
Backup Slide 3 • Calculation of Pointing Accuracy • Max pointing error of SMART-1: 60 arcminutes • 1 arcminute = 1/60*deg • 1 deg = .017 rad [Brian Erson] [Attitude] 6
Backup Slide 4 • References: • Berge, Bjork, Edfors, Jansson, et. Al., “The Attitude and Orbit Control System on the SMART-1 Lunar Probe”, Swedish Space Corporation, Solna, Sweden, 2004. • Longuski and Konig. A Survey of NongravitationalForces and Space Environmental Torques with Applications to the Galileo Spacecraft.AIAA/AAS AstrodynamicsConference: 9-11 Aug 1982. • Valley Forge Composite Technologies, Lou Brothers, Owner <http://www.vlyf.com/aerospace/wheels/standard-wheels> • Waletzko, Brittany: Environmental Perturbing Forces and Effect on Attitude Control; 1/2009 . • Westerman, Solomon, School of Aeronautics and Astronautics, Purdue University, 1/2009. [Brian Erson] [Attitude] 7