Download
1 / 16
180 likes | 844 Vues
Outline I. Fourier Transform II. Unit Impulse Response III. Hilbert Transform IV. Bessel Functions V. Convolution. IFT : frequency domain to time domain. g(t) = . G(f) = . Fourier Transform of all physically realizable time functions will exist

E N D
Outline I. Fourier Transform II. Unit Impulse Response III. Hilbert Transform IV. Bessel Functions V. Convolution
IFT: frequency domain to time domain g(t) = G(f) = • Fourier Transform of all physically realizable time functions will exist • Fourier Transform of all finite energy signals will exist Amplitude Spectrum is |G(f)| plotted vs f Phase Spectrum isθ(f) plotted vs f I. Fourier Transform FT: time domain to frequency domain
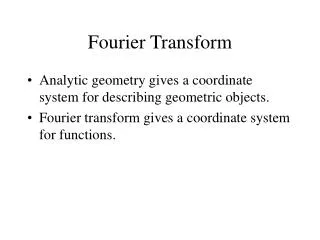
Duality of Fourier Transform X1(jw) x1(t) 2T1 -T1 T1 1 F[x2(t)] F-1[X2(jw)] F[x1(t)] F-1[X1(jw)] time domain frequency domain x2(t) W/π X2(jw) 1 -W W
T0 = 1/f0 t f 50 f0 3f0 f Ts = 1/fs Duality of Fourier Transform between frequency and time domain: (i) time periodic signal yields impulse sequence in frequency domain • (ii) time sampled impulse sequence yields periodic function in • frequency domain • weighted valued of impulse sequence defines signal completely in • either case
w(t) W(f) Rectangular Triangular Sinc Signum Step Impulse Common Functions and their Fourier Transform
Constant d ( f ) 1 1 Sinusoid f - f ( j ) ( j ) d - + d + e ( f f ) e ( f f ) c c 2 2 Phasor f ( j ) d - e ( f f ) 0 Guassian - p ( ft ) 2 t e 0 0 1-sided exponential Impulse Train w(t) W(f)
g(t) = • II. (t) = delta-dirac function (aka unit impulse) • (t) = 0 except at t = 0 • (t) has unit area under its curve and infinite amplitude • (t) = (-t) – is an even function • sifting or replication property: F-1{δ(f-f0)} = exp(j2πf0t) F{δ(t-t0)} = exp(-j2πft0) F{cos(2πf0t)} = ½ [δ(f - f0) + δ(f + f0)] F{sin(2πf0t)} = -½j [δ(f + f0) - δ(f - f0)]
III.Hilbert Transform phase shift x(t) by for positive frequencies phase shift x(t) by for negative frequencies = g(t)sin(2f0t + (t)) t R no domain change involved (e.g. Fourier Transform) quadrature filter has transfer function H(f) = -jsgn(f) if x(t) = g(t)cos(2f0t + (t)) t R
= Bessel Functions Bessel Differential Equation • equation has • a regular singularity at 0 • an irregular singularity at Bessel Functions are solutions to Bessel Equation
é a a ù ö ö æ æ - = + p r r ÷ ÷ y x C I ç x C Y ç x ê ú 1 q / r 2 q / r è è r r ø ø ë û • In(X) = Bessel Function of the 1st kind • Yn(X) = Bessel Function of the 2nd kind • C1and C2 are constants transformed version of Bessel differential equation (Bowman 1958) solution is
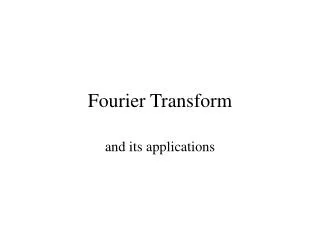
Special case ofn = 0 reduces to Bessel Function of the 1st Kind of Integer Order n • Bessel function for real argument x • real-valued and continuously differentiable • bounded in magnitude by 1 • even numbered Bessel Functions are symmetric • odd numbered Bessel Functions are anti-symmetric
Plot of Jn(X) =for n = 1,2,3… J0(X) J1(X) J2(X) J3(X) J4(X) X
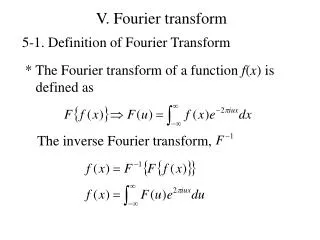
Modified Bessel Function of the 1st Kind of Integer Order n Special case ofn = 0 reduces to • Modified Bessel functionfor real argumentx • real-valued and continuously differentiable • grows exponentially as |x| increases • even numbered Bessel Functions are symmetric • odd numbered Bessel Functions are anti-symmetric
Plot of In(X) =for n = 1,2,3… I4(X) I2(X) I0(X) I1(X) I3(X) X
IV. Convolution used to determine response to unit impulse • (i) Linear, Time-Invarient system with • impulse response given by h(t) • for arbitrary input x(t) system responseat time t given by y(t) y(t) = or y(t) = = excitation time t= response time t - = system memory time • current system response = integral over past input signal weighted • by system impulse response System Transfer Function given by H(f) = F[h(t)] = Frequency Response given by Y(f) = H(f)X(f)
System Transfer Function given by H(f;) = y(t) = • (ii) LinearTime-Varying Wireless Communications Channel • response depends on the time when unit impulse was applied • impulse response given by h(t;) = system response at time t to unit • impulse applied at time • - unit impulse applied at t- • - system response measured at t • for arbitrary input x(t) system responseat time t given by y(t)