Download
1 / 20
220 likes | 363 Vues
Explore obstacle avoidance using attractive and repulsive potentials in two-dimensional grids. Learn about potential fields method for automatic path planning and control strategy. Find out more with a virtual corridor alignment for line following.

E N D
Autonomous vehicle navigation An Obstacle Avoidance Exercise Luca Baglivo, Mariolino De Cecco
We’re using two-dimensional grids: maps represented as images!
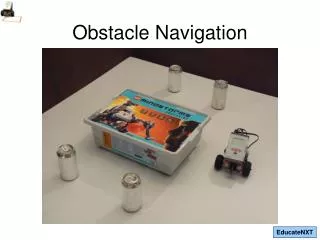
Let’s consider the following simplified scenario: Goal Start
+ ATTRACTIVE POTENTIAL REPULSIVE POTENTIAL … AND IMAGINE ROBOT AS A BALL ROLLING DOWN HILLS
POTENTIAL FIELDS METHOD FEATURES: • AUTOMATIC PATH PLANNING FOR OBSTACLE AVOIDANCE • IS BOTH A PLANNING & CONTROL STRATEGY ALL-IN-ONE • BEST FOR LOCAL PATH PLANNING->UNEXPECTED OBSTACLES • BE AWARE FROM LOCAL MINIMA! HARMONIC POTENTIAL FUNCTIONS HAS PROVEN ONLY GLOBAL MINIMA • NOT SUITABLE FOR HIGH PRECISION POSITIONING ON TARGET
THE RESULTING FORCE IS THE GRADIENT AND GIVES DIRECTION TO THE ROBOT This example is in the Matlab script “OstacoliQuadrati.m”
ANOTHER, NAIVE FORMULATION A VIRTUAL CORIDOR ALIGNMENT FOR LINE FOLLOWING • The attractive potential can be defined punctually as desired. • Build a vector field that point towards desired path.
ANOTHER, NAIVE FORMULATION A VIRTUAL CORRIDOR ALIGNMENT FOR LINE FOLLOWING • How to define it yF alphaK angles (+) y K xF Lc
ANOTHER, NAIVE FORMULATION A VIRTUAL CORIDOR ALIGNMENT FOR LINE FOLLOWING • How to compute steering angle input aK d y K steering axis
ANOTHER, NAIVE FORMULATION A VIRTUAL CORIDOR ALIGNMENT FOR LINE FOLLOWING • Now add the repulsive force vector Frep, and play … Frep Ftot delta’ y K
ANOTHER, NAIVE FORMULATION A VIRTUAL CORIDOR ALIGNMENT FOR LINE FOLLOWING • A control sketch y Potential field gradient vector velocity Robot kinematic model alphaK steer angle - delta + Steer control kcontrol
ANOTHER, NAIVE FORMULATION A VIRTUAL CORIDOR ALIGNMENT FOR LINE FOLLOWING • Try with: • Tricycle robot forward velocity, point obstacle at (xF,yF) = (4,1.5) D1 yR b
Bibliography Siegwart R., Nourbakhsh I, Scaramuzza D., Introduction to Autonomous Mobile Robots