Download
1 / 37
370 likes | 548 Vues
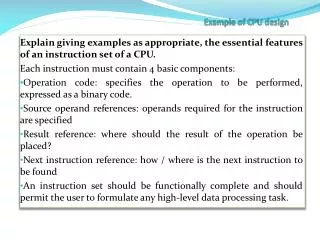
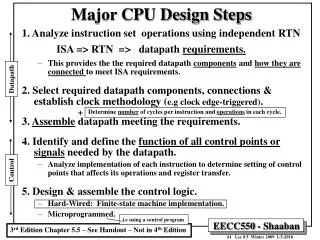
More Basics of CPU Design. Lecture for CPSC 5155 Edward Bosworth, Ph.D. Computer Science Department Columbus State University. Design of a CPU. This lecture covers topics basic to the design of a modern CPU, including that of the MIPS.

E N D
More BasicsofCPU Design Lecture for CPSC 5155 Edward Bosworth, Ph.D. Computer Science Department Columbus State University
Design of a CPU • This lecture covers topics basic to the design of a modern CPU, including that of the MIPS. • The storage elements used to save data and to save the execution state. • The flow of data through the CPU. • The control signals that control the CPU Some slides in this lecture will be based on an earlier design (the Boz-5) by your instructor.
The von Neumann Design • The CPU interacts with the memory though control signals and two registers. • For the MIPS, each of the MAR and MBRis a 32-bit register.
Components of a CPU • Here are the main components of a CPU • . • The control unit interprets the machine language instruction in the IR and emits control signals to cause the CPU to execute that instruction.
The Fetch–Execute Cycle • This cycle is the logical basis of all stored program computers. • Instructions are stored in memory as machine language. • Instructions are fetched from memory and then executed. • The common fetch cycle can be expressed in the following control sequence. MAR PC.// PC contains the address of the instruction. READ. // Put the address into MAR and read memory. IR MBR. // Place the instruction into the MBR. This sequence is common for all instructions executed.
The ALU (Arithmetic Logic Unit) • The ALU performs all of the arithmetic and logical operations for the CPU. • These include the following:Arithmetic: addition, subtraction, negation, etc.Logical: AND, OR, NOT, Exclusive OR, etc.
More on the ALU • This symbol has been used for the ALU since the mid 1950’s. It shows two inputs and one output. • Many operations, such as addition and logical AND, are dyadic; that is, they take two inputs. • Monadic operations, such as logical NOT, will use only one of the input busses and ignore the other.
The Structure of One ALU • We illustrate the structure of an ALU with the design used on the Boz-5. • First, the ALU is divided into four sub-units. • Each sub-unit is then designed independently. • Modern ALU design is somewhat different.
The Transfer/Not Sub-Unit • This is very simple. It contains the following circuit, replicated 32 times.
Sign Extension • The MIPS design calls for the sign extension of a 16-bit value, stored in IR15-0 to a signed 32 bit value for input to the ALU • For a 16-bit value, bit 15 is the sign bit.For a 32-bit value, bit 31 is the sign bit.
Examples of Sign Extension • + 100 in 8–bit 0110 0100 • + 100 in 16–bit 0000 00000110 0100 • –100 in 8–bit 1001 1100 • –100 in 16–bit 1111 11111001 1100 • Rule – just extend the sign bit to fill the new “high order” bits.
Fixed Shift Left by 2 • Address calculation in the MIPS calls for multiplication by 4, equivalent to a logical left shift by 2 bits. • In contrast to a general shift circuit, which might need to pass the original value, this is very simple. • Just connect the input to output as shown here.
Binary Addition • We first consider addition of two 1-bit values. • Here is the truth table for what is called a “half adder” for A + B; no carry in.
Another Use of XOR • Here is the truth table for the XOR gate. • This illustrates one use of the XOR gate.
Two’s-Complement and Subtraction • Remember how to negate a number in the two’s-complement system. This leads to the following approach to implementing subtraction
Overflow: Busting the Arithmetic The range of 16–bit two’s–complement arithmetic is– 32,768 to 32,767 Consider the following addition problem: 24576 + 24576.Now + 24,576 (binary 0110 0000 0000 0000) is well within the range. 0110 0000 0000 0000 24576 0110 0000 0000 0000 24576 1100 0000 0000 0000 – 16384
Detecting Overflow • Look at the carry-in and carry-out from the sign bits. Overflow occurs when C31C32 = 1.
The CPU Bus Structure • The CPU has an internal data bus structure, with three data busses dedicated to the ALU: two for input and one for output. • A bus normally has more than one wire, though serial busses are in use. • The data busses in MIPS have 32 bits.
What About 1 CPU Bus? • This will be too slow, taking 3 time steps to add. • Here is the sequence, based on the fact that the bus can carry only 1 thing at a time. • T1: R1 Bus, Bus Y • T2: R2 Bus, Add • T3: Z Bus, Bus R3.
The Three-Bus Solution • The three-bus solution allows the ALU to add and update the register in one clock cycle.
The MIPS Solution: One ALU and Two Adders • One can design a CPU with one ALU, with the restriction that it can do only 1 thing at a time. • The MIPS design calls for two arithmetic operations related to addresses in addition to the standard ALU operations. • The solution is to dedicate two adders to address arithmetic in addition to the ALU.
A Bus Connects Two Devices • The bus takes one of a number of devices as a data source, and normally has 1 destination.
D Q Clk Clk D Q Sequential Elements • Register: stores data in a circuit • Uses a clock signal to determine when to update the stored value • Edge-triggered: update when Clk changes from 0 to 1 Chapter 4 — The Processor — 33
Clk D Q Write Write D Clk Q Sequential Elements • Register with write control • Only updates on clock edge when write control input is 1 • Used when stored value is required later Chapter 4 — The Processor — 34
Clocking Methodology • Combinational logic transforms data during clock cycles • Between clock edges • Input from state elements, output to state element • Longest delay determines clock period Chapter 4 — The Processor — 35
The Control Unit • The function of the CU (Control Unit) is to take the binary information in the IR (Instruction Register) and other status information to generate signals to control the execution of the program in the computer.