Second Order Systems
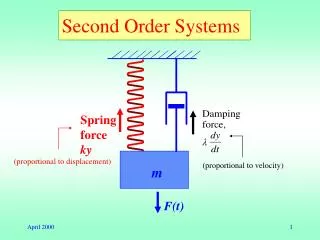
m. Second Order Systems. Spring force ky. (proportional to displacement). (proportional to velocity). F(t). Second-Order Systems. Contains the following two elements Energy storage element Damper restricts flow of energy

Second Order Systems
E N D
Presentation Transcript
m Second Order Systems Spring force ky (proportional to displacement) (proportional to velocity) F(t)
Second-Order Systems • Contains the following two elements • Energy storage element • Damper restricts flow of energy • Examples- Ringing a bell- Shock absorber connected to spring in your car- Capacitance-inductance electrical systems- Catheter-transducer
Basic Equations • General equation for 2nd-order systems • Divide ao throughout the above equation gives us • x is forcing function and represents what we’re trying to measure. • y is instrumentation output
Basic Equations • General equation for 2nd-order systems • Define • A general solution is:
Basic Equations, cont’d • If a1 = 0 ( and therefore = 0) the damping force is zero and system responds by oscillating with its natural frequency, n. • If 0 < < 1, system is “under-damped” and responds by ringing down. • If = 1, the system is “critically damped” and responds quickly, w/no oscillations • If a1 is large such that > 1, then system is “over-damped” and responds slowly, without oscillations
With our definitions of n and , our equation becomes Equation in terms of naturalfrequency and damping ratio “standard form” If < 1, our general solution is: ( a decaying sinusoid )
Particular Solution - Recall that the general solution is for the case where there is no forcing function, that is, when Kxo=0. - To get the total solution, we add the forcing function to the general solution: ytotal = ygen + ypart = ygen + Kxo = - If the forcing function changes abruptly from x = 0 to x= xo at t = 0, an ideal measurement device would read Kxo immediately. But since this is a second order system, we will see damping and ringing (for < 1) before the measurement system “settles” on the measurand actual value of K xo. For these initial conditions and knowing as t , y Kxo, we get (book uses ye = Kxo)
Solution Changes With Damping underdamped case undamped case critically damped case overdamped case
Basic 2nd Order Behavior y underdamped case ( < 1) critically damped case (=1) overdamped case ( > 1) t Driving function (Kxo) is “step up” y overdamped case ( > 1) critically damped case (=1) underdamped case ( < 1) t Driving function (Kxo) is “step down”
An Example of the 2nd-Order Equation • The following equation describes the behavior of a second-order system. Determine the natural frequency and the damping ratio of the system. Covert it to standard form as shown in Eq.(11.21) and find the equilibrium response (response of the system in the absence of the dynamic effect) of the system.
Solution for n and • Comparing the coefficients of the above two equations give us underdamped
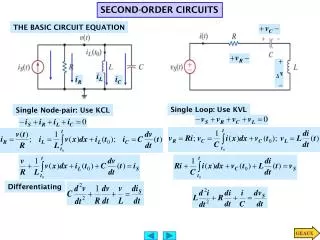
Second Order Equation • Remember Newton’s Second Law? • The Sum of forces: • Where • m = mass • l = damping force coefficient • k = spring constant
Second Order Equation • Relate to measured parameters • Where • wn = natural frequency • z = damping ratio • K = 1/k = 1/spring constant
Second Order Equation • What are some parameters?
Second Order Solution • Consider a step input • Forcing function, F(t) • Change from x = 0 to x = xo at t = 0 • The response of the system depends on damping ratio, z • z < 1, underdamped (damped oscillation) • z > 1, overdamped (asymptotic response) • if z = 1, critically damped (response is on the verge of oscillating)
Second Order Responses 2.5 damping ratio=0.0 2 0.25 0.75 1.5 y/Kx 1 0.5 1 1.5 2 0 0 2 4 6 8 10 nt wnt
Second Order System (Continued) A Pressure Transducer
Sinusoidal Input (Forcing) Function • x = xo sin t • forcing function is Kx • Ideal system (without dynamic (d/dt) effects would provide an output ye = Kxo sin t • Actual response (y) has a damped part that dies out and a long term part that relates to the driving function • Continuing part given by: Measurement System Response Measurand
Second Order Responses Response of a 2nd-order System to a Sinusoidal Input Amplitude Ratio (y/kxo) Frequency Ratio (w/wn) Work Examples
2nd Order System EXAMPLESPressure Transducer A small tube, 0.5 mm in diameter, is connected to a pressure transducer through a volume of 3.5 m3. The tube has a length of 7.5 cm. Air at 1 atm and 20oC is the pressure-transmitting fluid. Calculate the natural frequency for this system.
Pressure Transducer- An Example of 2nd-Order System Calculate the damping ratio and the attenuation of a 100-Hz pressure signal in the system.
Cantilever Beam- Another Example of 2nd-Order System A 1/16-in-diameter spring-steel rod is to be used for a vibration frequency measurement as shown in the figure below. The length of the rod may be varied between 1 and 4 in. The density of this material is 489 lbm/ft3, and the modulus of elasticity is 28.3106 psi. Calculate the range of frequencies that may be measured with this device.
This Week in the Lab Measuring Parameters • wd : the damped frequency • z : the damping ratio • wn : the undamped natural frequency
The Solution • Only Concerned with the underdamped response.
Measuring wn • the answer here is a simple calculation