Smith Chart Review: Polar vs. Rectilinear Impedance Mapping & Analyzing Circuits
Explore the Smith Chart, polar and rectilinear impedance planes, impedance measurements, dynamic range, and more. Learn how to use smoothing and averaging for accurate results in RF measurements.

Smith Chart Review: Polar vs. Rectilinear Impedance Mapping & Analyzing Circuits
E N D
Presentation Transcript
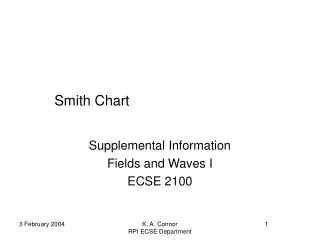
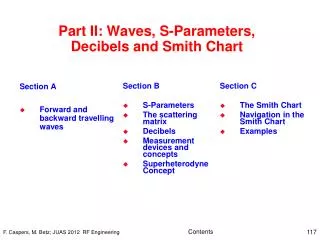
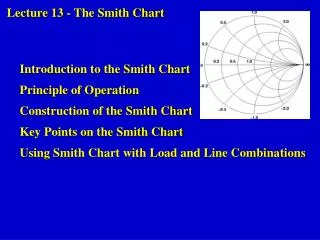
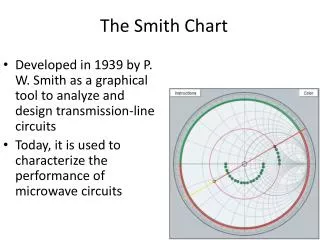
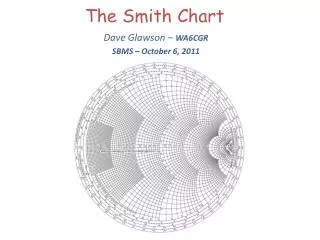
o +jX 90 +R 0 ¥ o + o 180 0 - ¥ 0 -jX o -90 Smith Chart Review . Polar plane 1.0 .8 .6 .4 .2 Rectilinear impedance plane Constant X Z = Zo Constant R L G = 0 Smith Chart maps rectilinear impedance plane onto polar plane (short) (open) Z = 0 Z = L L G G O 0 = 1 O 1 ±180 = Smith Chart
IF BW and averaging Heterodyne detection scheme IF BW reduction Averaging Dynamic Range (definition)
Smoothing trace Smoothing (similar to video filtering) averages the formatted active channel data over a portion of the displayed trace. Smoothing computes each displayed data point based on one sweep only, using a moving average of several adjacent data points for the current sweep. The smoothing aperture is a percent of the swept stimulus span, up to a maximum of 20%. Rather than lowering the noise floor, smoothing finds the mid-value of the data. Use it to reduce relatively small peak-to-peak noise values on broadband measured data. Use a sufficiently high number of display points to avoid misleading results. Do not use smoothing for measurements of high resonance devices or other devices with wide trace variations, as it will introduce errors into the measurement.
Averaging trace Averaging computes each data point based on an exponential average of consecutive sweeps weighted by a user-specified averaging factor. Each new sweep is averaged into the trace until the total number of sweeps is equal to the averaging factor, for a fully averaged trace. Each point on the trace is the vector sum of the current trace data and the data from the previous sweep. A high averaging factor gives the best signal-to-noise ratio, but slows the trace update time. Doubling the averaging factor reduces the noise by 3 dB.
IF BW reduction IF bandwidth reduction lowers the noise floor by digitally reducing the receiver input bandwidth. It works in all ratio and non-ratio modes. It has an advantage over averaging as it reliably filters out unwanted responses such as spurs, odd harmonics, higher frequency spectral noise, and line-related noise. Sweep-to-sweep averaging, however, is better at filtering out very low frequency noise. A tenfold reduction in IF bandwidth lowers the measurement noise floor by about 10 dB. Bandwidths less than 300 Hz provide better harmonic rejection than higher bandwidths.
Which Value Do We Measure? Kobe Instrument Division Back to Basics - LCRZ Module TRUE EFFECTIVE INDICATED % +/- Real world device Instrument Test fixture
Frequency vs. Measurement Techniques Kobe Instrument Division Back to Basics - LCRZ Module Network Analysis 100KHz RF I-V 1 MHz 1.8 GHz I-V 10KHz 110MHz Resonant 22KHz 30MHz 70MHz Auto Balancing Bridge 5HZ 40MHz 10K 100K 10M 100M 1G 1 10 100 1K 1M 10G Frequency (Hz)
Auto Balancing Bridge Theory of Operation Virtual ground Kobe Instrument Division Back to Basics - LCRZ Module R H 2 L DUT I I 2 I = I V 2 1 - + V = I R V 2 2 2 2 V R V 1 2 1 = Z = I V 2 2
Most accurate, basic accuracy 0.05% Widest measurement range C,L,D,Q,R,X,G,B,Z,Y,O,... Widest range of electrical test conditions Simple-to-use Low frequency, f < 40MHz Advantages and Disadvantages Auto Balancing Bridge
e Z R V V D X = = (at resonance) C I e |V| |X | D e R R D D Resonance (Q - Meter) Technique Theory of Operation Kobe Instrument Division Back to Basics - LCRZ Module Tune C so the circuit resonates At resonance X = -X , only R remains D C D DUT L (X ), R D D Tuning C (X c) ~ e V I= V OSC |X | C Q = = =
limited compensation No compensation Advantages and Disadvantages Very good for high Q - low D measurements Resonant Method Requires reference coil for capacitors Limited L,C values accuracy Vector Scalar 75kHz - 30MHz 22kHz - 70MHz automatic and fast manual and slow easy to use requires experienced user
I - V Probe Technique Theory of Operation Kobe Instrument Division Back to Basics - LCRZ Module R V 2 2 V = I R 2 2 2 V 1 V R V 2 I 1 1 = Z = 2 I V DUT 2 2
Grounded and in-circuit measurements Simple-to-use Advantages and Disadvantages I-V (Probe) Medium frequency, 10kHz < f < 110MHz Moderate accuracy and measurement range
RF I-V Theory of Operation Kobe Instrument Division Back to Basics - LCRZ Module Low Impedance Test Head High Impedance Test Head Current Current Voltage Detection Voltage Detection Vi Detection Vi Detection Ro Ro Vv Ro Vv Ro DUT DUT
Advantages and Disadvantages RF I-V High frequency, 1MHz < f < 1.8GHz Most accurate method at > 100 MHz Grounded device measurement
Network Analysis (Reflection) Technique Theory of Operation Kobe Instrument Division Back to Basics - LCRZ Module V INC DUT V R V Z - Z O L R = = V Z + Z L INC O
Advantages and Disadvantages Network Analysis High frequency - Suitable, f > 100 kHz - Best, f > 1.8 GHz Moderate accuracy Limited impedance measurement range (DUT should be around 50 ohms)
Series R & L Parallel R & C V Z - Z O L R = = V Z + Z INC O L t 0 H TDR Theory of Operation Oscilloscope Kobe Instrument Division Back to Basics - LCRZ Module DUT V V R INC Z L Step Generator
Advantages and Disadvantages TDNA (TDR) Reflection and transmission measurements Single and multiple discontinuities or impedance mismatches ("Inside" look at devices) DUT impedance should be around 50 ohms Not accurate for m or M DUTs or with multiple reflections Good for test fixture design, transmission lines, high frequency evaluations
1 nF 1 mH 10 nF 10 mH 1 kOhm Corto circuito
1 nF 1 mH 10 nF 10 mH 1 kOhm Corto circuito
o o Phase 45 /Div Phase 1 /Div Deviation from Linear Phase Use electrical delay to remove linear portion of phase response Linear electrical length added Deviation from linear phase RF filter response (Electrical delay function) + yields Frequency Frequency Frequency Low resolution High resolution
-d f d w d f d f p w ( f ) 2 = What is group delay? Group Delay w t g Frequency Group Dw Delay t o f Phase Average Delay Df Group Delay (t ) = Frequency g Deviation from constant group delay indicates distortion -1 = * o 360 f in radians Average delay indicates transit time w in radians/sec f in degrees in Hz f
-d f -d f d w d w Why measure group delay? Phase Phase f f Group Delay Group Delay f f Same p-p phase ripple can result in different group delay