Understanding Charts and Diffeomorphisms in Manifolds: A Comprehensive Overview
This document explores the concept of charts in differential geometry, focusing on neighborhoods and functions that demonstrate diffeomorphisms. It discusses the properties of differentiable manifolds, coordinates, and neighborhoods, highlighting key concepts such as second countability, transition functions, and the Hausdorff requirement. Examples include the 1-sphere (circle) and 2-sphere (surface of a sphere), illustrating how overlapping charts provide insights into the structure of these manifolds. A clear understanding of these elements is crucial for advanced studies in geometry.


Understanding Charts and Diffeomorphisms in Manifolds: A Comprehensive Overview
E N D
Presentation Transcript
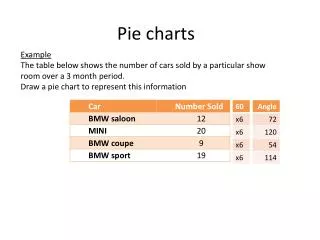
A chart is a neighborhood W and function f. WX f: WEd fis a diffeomorphism The dimension of the chart is the dimension d of Ed. Coordinate Chart 2-sphere: S2 x X W f real plane: E2
A space is first countable if there is countable neighborhood basis. Includes all metric spaces A space is second countable if the whole topology has a countable basis. Euclidean space is second countable. Points with rational coordinates Open balls with rational radii Countability N x X
A differentiable structure F of class Cn satisfies certain topological properties. Union of charts U Diffeomorphisms f Locally Euclidean space M A differentiable manifold requires that the space be second countable with a differentiable structure. Differentiable Manifold
Open set around A looks like a line segment. Two overlapping segments Each maps to the real line Overlap regions may give different values Transformation converts coordinates in one chart to another Charting a circle 1-sphere: S1 A f real line: E1
A manifold M of dimension d Closed MEn pM, WM. W is a neighborhood of p W is diffeomorphic to an open subset of Ed. The pairs (W, f) are charts. The atlas of charts describes the manifold. Charts to Manifolds Hausdorff requirement: two distinct points must have two distinct neighborhoods.
Circle Manifold • Manifold S1 • Two charts • q: (-p/2, p) • q ’: (p/2, 2p) • Transition functions • (p/2, p) f: q ’= f(q) = q • (-p/2, 0) f: q ’= f(q) = q + 2p 1-sphere: S1 p/2 p 0 3p/2
Sphere S2 2-dimensional space Loops can shrink to a point Simply-connected Torus S1S1 2-dimensional space Some loops don’t reduce Multiply-connected Sphere or Torus
Torus Manifold • Manifold S1 S1 • Four charts • Treat as two circles • {q,f}, {q,f’}, {q ’,f}, {q ’, f’} • q: (-p/2, p), f: (-p/2, p) • q ’: (p/2, 2p), f’: (p/2, 2p) • Transition functions are similar to the circle manifold. Torus: S1 S1 q (0,0) chart 1 f (-p/8,-p/8) chart 1 (15p/8,15p/8) chart 4
Sphere Manifold • Manifold S2 • Chart 1 described in spherical coordinates: • q: (-3p/4, 3p/4) • f: (p/4, 7p/4) • Chart 2 • q’, f’ use same type of range as chart 1 • Exclude band on chart 1 equator from q = [-p/4, p/4] and f = [3p/4, 5p/4] 2-sphere: S2 Chart 2 Chart 1 next