Design of Tree Algorithm
This article focuses on the design of a robust tree construction protocol for distributed programs, emphasizing safety and liveness properties. It delves into the concepts of invariants and fault-span, which are crucial for maintaining system integrity during faults. The goal is to systematically reconstruct trees while preserving necessary constraints even in fault conditions, ensuring that nodes remain informed about their states and connections. The framework outlined provides a structured approach to managing nodes, colors, and parent relationships while preventing cycles and inconsistencies during recovery.

Design of Tree Algorithm
E N D
Presentation Transcript
Design of Tree Algorithm • Goal: • Learning about satisfying safety and liveness of a distributed program • Utilizing invariants and fault-span systematically while designing distributed programs • design a tree construction protocol systematically by constructing its invariant and fault-span • This is known as nonmasking algorithm since safety may not be preserved during recovery
Intuition in Design of the Program • Invariant • Set of constraints that should be true in the absence of faults • Alternatively, after recovery is complete • Fault-span • Set of constraints that should be true even in the presence of faults • One safety property of interest • Constraints in fault-span should be preserved • One liveness property of interest • Constraints in the invariant should be eventually satisfied
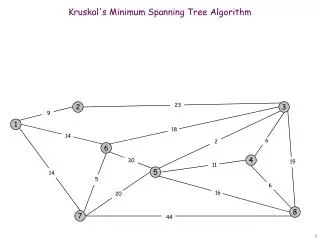
Ideal State • Given is a graph G = (V, N). • V denotes the set of processes/nodes • N denotes edges that show adjacency of processes • Each process j maintains a variable P.j. P.j denotes the parent of j in the tree. • Each process also has a unique ID • In an ideal state the graph imposed by the parent relation forms a tree • This will be one constraint in the invariant • What are the program actions inside the invariant?
Faults • Can fail or repair a process • Goal: Reconstruct the tree with the available processes
Due to faults, we may have • Unrooted trees • Because some node’s parent has failed • Multiple (rooted) trees • For example, when a node is repaired, it may form a tree by itself • Observe that there are no cycles. In other words, in the presence of faults, a cycle is not created. • We may want to preserve this during reconstruction. • I.e., this constraint should be in the fault-span
Predicates for Fault-Span (1) • The graph imposed by the parent relation is a forest
Approach for Reconstruction • Dealing with unrooted trees • Somehow the nodes in unrooted trees should be informed so that they know that they are in an unrooted tree • Approach: Introduce a variable color (col) • Green = node thinks it is in rooted tree • Red = node thinks it is in unrooted tree
What would I like to be true about colors in invariant? • Ok with gg, rr, • If j and parent of j are alive then • j is red parent of j is red • What would I like to be true about colors in fault span? • Ok with gg, rr, rg • If node j is red => parent of j is red or parent of j has failed
Difference between fault span and invariant • States where j is green and parent of j is either red or parent of j has failed • State that is in fault span but not invariant • Provide recovery from here to invariant
Predicate in Invariant • What property would have to be satisfied to obtain the meaning of the colors? • S1 = (P.j N.j col.(P.j) = red) col.j = red • Suppose this is not true, how to fix it?
Action (1) col.j = green (P.j N.j col.(P.j) = red) col.j = red
Variant Function • Will the previous action, result in a state where S1 will be true for all nodes? • Need to identify a variant function • Property of the variant function • Its value never increases • Execution of this action decreases the value • The value is bounded from below • The function is well-founded
Predicate in Fault-Span (2) • The graph imposed by the parent relation is a forest • col.j = red (P.j N.j col.(P.j) = red) • Recall that we need to check if program actions will preserve this predicate!
Note • Observe that Action (1) is aimed at correcting a predicate in the invariant • Must ensure that during correction, the fault-span constraints are not violated
Predicate in Invariant • (P.j N.j col.(P.j) = red) col.j = red • col.j = green
Action (2) • When should a node set its color to green • Need to ensure that constraints of fault-span are not violated • Need to ensure that constraints of previous predicates in invariant are not violated
Action (2) col.j = red (????) col.j = green Choose ???? so that this action does not affect fault-span predicate/previous predicates in invariant
Action (2) col.j = red (j is a leaf) col.j = green, P.j = j
After fixing S1 and S2 • All nodes are green • Only way to satisfy constraint S1 is to ensure that P.j is a neighbor of j
Merging Multiple Trees • Introduce variable root • root.j denotes the ID of the process that j believes to be the root • If a process finds another process with higher root value, it can choose to switch to it.
Action (2) modified col.j = red (j has no children) col.j = green, P.j = j, root.j = j
Predicate in Invariant (3) • (P.j N.j col.(P.j) = red) col.j = red • col.j = green • root.j = root.k
Action (3) root.j < root.k (????) root.j = root.k, P.j = k
Action (3) root.j < root.k col.j = green /\ col.k = green root.j = root.k, P.j = k
Predicate in Fault-Span • The graph imposed by the parent relation is a forest • col.j = red (P.j N.j col.(P.j) = red) • col.(P.j) = green root.j root.(P.j) • j root.j • j = root j iff j = P.j
Recovery Action for Process Recovery of node j col.j = red, P.j = j, root.j = j
Observations: Stepping Back • We encountered some problems in design of this protocol • Consider the action that changed its color to green • If allowed to execute as is the fault span predicate would have been violated • We fixed it by restricting when the action can be executed • Consider the action by which j changes tree to k • There was a potential to cause a cycle • We fixed it by strengthening (reducing) the fault span so that such a state is not reached in the presence of faults • Another possible choice was to weaken (expand) fault span so that the state where j changes tree to form cycle is included in it. • We will see example of this in next module
Observations (continued) • For the case where we considered where j changes tree to k • We could have argued that such a state could not exist. • But that would require one to consider sequences of program executions. • Generally, humans are not very good at this: • The use of invariant/fault span allowed us to only consider one action at a time. • This is typically a lot easier than being able to analyze all possible sequences. • Variant functions play a similar role for liveness.
Analyzing Sequences • Consider the following code where there are two threads and executes the code below For (int j = 0 ; j < 5 ; j++) temp = sum ; sum = temp + 1 • Sum is a shared variable initialized to 0. And, j and temp are private variables of each thread. • What is the final value of sum
Assumptions Made in the Protocol • If a node fails then its neighbors can detect it • Detection is accurate, i.e. a live node would not be suspected and a failed node is guaranteed to be suspected. • Is this assumption necessary? • What would we do if we did not have such an assumption? • Can we still re-build the tree? • We will study this aspect a little later.