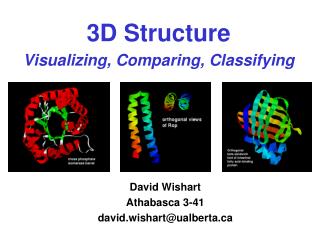
Static Analysis: Modal Superposition
Static Analysis: Modal Superposition. Objectives. Section II – Static Analysis Module 6 – Modal Superposition Page 2. This module will present the equations and theory used to perform a Modal Superposition Analysis of a linear system. The basis of Mode shapes will be discussed.

Static Analysis: Modal Superposition
E N D
Presentation Transcript
Static Analysis: Modal Superposition
Objectives Section II – Static Analysis Module 6 – Modal Superposition Page 2 This module will present the equations and theory used to perform a Modal Superposition Analysis of a linear system. • The basis of Mode shapes will be discussed. • A system of single degree of freedom equations will be presented. • The individual modes and total response will be examined.
Equations of Motion Section II – Static Analysis Module 6 – Modal Superposition Page 3 • The equations of motion for a linear system developed in Module 5: Natural Frequency Analysis are • The mode shapes form a basis for the solution space of the undamped system and the displacements can be written as a linear combination of the mode shapes • is a matrix that has a mode shape in each column.
Time Derivative Equations Section II – Static Analysis Module 6 – Modal Superposition Page 4 • The velocities and accelerations written in terms of the mode shapes and coefficients are • These equations can be used to transform the equations of motion from a coupled set of equations to an uncoupled set. Note that the mode shapes are not a function of time and only the coefficients, x, have time derivatives.
Transformation Process Section II – Static Analysis Module 6 – Modal Superposition Page 5 • Substituting the time derivative equations into the equations of motion for an undamped system yields the equation
Mass Orthonormal Mode Shapes Section II – Static Analysis Module 6 – Modal Superposition Page 6 • If the mode shapes are orthonormal to the mass matrix, then the following relationships hold (reference Module 5: Natural Frequency Analysis). is the identity matrix Square matrix with natural frequencies on the diagonal elements and zero for all non-diagonal elements
Uncoupled Equations Section II – Static Analysis Module 6 – Modal Superposition Page 7 • Combining the equations on the previous two slides yields the equation • Each row of the this equation contains an equation of the form where is equal to the i th row of times .
Modal Participation Factors Section II – Static Analysis Module 6 – Modal Superposition Page 8 • The i th row of the forcing function term can be written as where each term is called a modal participation factor. • The subscripts are j th mode shape i th equation
Physical Significance Section II – Static Analysis Module 6 – Modal Superposition Page 9 • The physical significance of the modal participation factors is best illustrated using an example. • If a force is applied at the end of a cantilevered beam, it has a large affect in exciting the first mode because the mode shape has a large value at this point. • If a force is applied at the point of zero displacement in the second mode, the force does not excite the second mode because the mode shape value at this point is zero.
Integration Section II – Static Analysis Module 6 – Modal Superposition Page 10 • Each of the equations can be integrated separately to determine the variation of the coefficient as a function of time. • Once all of the equations have been integrated, the response of the total system can be obtained from the linear superposition equation
Practical Systems Section II – Static Analysis Module 6 – Modal Superposition Page 11 • The development up to this point has used all n-degrees of freedom of the system. • It is generally only necessary to include the response of a small subset of the total number of modes to accurately compute the response of the system. • The frequency content of the applied load and the points on the structure where loading is applied, play a large role in determining how many modes should be considered in determining the response. • It is not necessary to include mode shapes having natural frequencies that are significantly higher than the highest frequency in the excitation forces.
Damping Section II – Static Analysis Module 6 – Modal Superposition Page 12 • Damping was omitted in the preceding development but can be included. • Damping can be attributed to a variety of material properties (viscoelastic materials have good damping properties) or displacement dependent mechanisms (slipping of bolted joints). • Damping is difficult to quantify analytically and must be determined experimentally. • Damping is generally different for each mode and can be nonlinear (i.e. the more a structure deforms, the higher the damping).
1 inch wide x 12 inch long x 1/8 inch thick. Material - 6061-T6 aluminum. Example Problem Section II – Static Analysis Module 6 – Modal Superposition Page 13 Simulation is used to compute the step response of the cantilevered beam using the first five natural frequencies and mode shapes computed in Module 5. Fixed End Brick elements with mid-side nodes are used to improve the bending accuracy through the thin section. 0.0625 inch element size. 5 lb. force distributed over the 17 nodes on the upper edge of the free end
Example Analysis Parameters Section II – Static Analysis Module 6 – Modal Superposition Page 14 zis equal to 0.5% for all modes Discussed on next slide Forces become active at 0.05 seconds List of nodes on upper edge of free end Load curves are scaled by a factor of 1 in the y-direction
Example – Time Step Section II – Static Analysis Module 6 – Modal Superposition Page 15 • The time step is based on the natural frequencies in the system and the frequency content of the input. • The input force causes bending about the weak axis and will only excite modes that have bending about the weak axis. • The natural frequency of the third weak axis bending mode was computed in Module 5 to be 592 Hz. • The period of this frequency is 0.00169 seconds. • 8-10 time steps per smallest period is generally used as a time step. Mode 4, 592 Hz, 3rd bending mode about the weak axis
Example – Restart Data Section II – Static Analysis Module 6 – Modal Superposition Page 16 • A modal superposition analysis uses natural frequency and mode shape data from a Natural Frequency Analysis. • The Design Scenario containing this information must be specified. • In this problem, the natural frequency analysis was performed in Design Scenario 2 that has been renamed to Nat Freq and Mode Shapes.
Example - Load Curves Section II – Static Analysis Module 6 – Modal Superposition Page 17 5 lb. acting in the negative y-direction is divided among 17 nodes When activated after 0.05 seconds, the load will be constant
Example – Fixed End Stress History Section II – Static Analysis Module 6 – Modal Superposition Page 18 • The higher frequency response can be seen superimposed on the dominant first mode response. is plotted
Example – Tip Displacement Section II – Static Analysis Module 6 – Modal Superposition Page 19 Start of Step Input The response is dominated by the 1st bending mode. This curve looks much smoother than the stress history curve. Why? The stresses are based on strains that depend on the derivatives of the displacements. 0.036 sec 27.8 Hz
Module Summary Section II – Static Analysis Module 6 – Modal Superposition Page 20 • The equations and theory used to perform a Modal Superposition Analysis of a linear system are presented. • Mode shapes form a basis and all solutions can be written in terms of them. • This results in a system of single degree of freedom equations that can be integrated separately. • The results from the individual modes are then combined to determine the total response. • Often, only a small subset of the total number of modes need to be used to obtain accurate results.