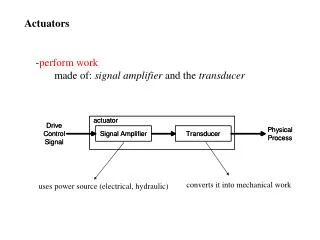
Actuators
Actuators. By: Steven Freeman 10/6/04. Outline. Types Uses Costs Standards Vendors Technical Paper References Summary. Types of Actuators. Electrical Ac and dc motors Stepper motors solenoids Hydraulic Use hydraulic fluid to actuate motion Pneumatic

Actuators
E N D
Presentation Transcript
Actuators By: Steven Freeman 10/6/04
Outline • Types • Uses • Costs • Standards • Vendors • Technical Paper • References • Summary
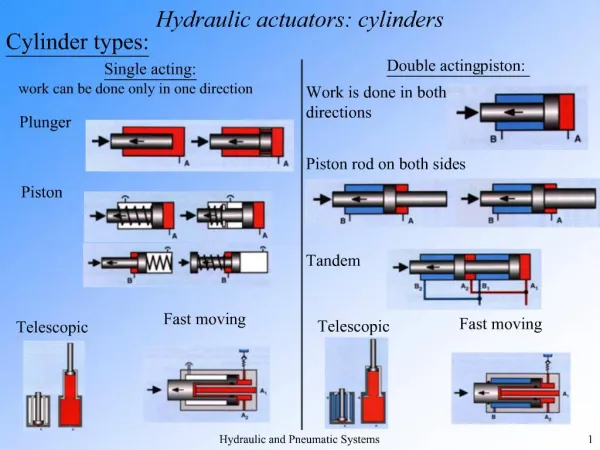
Types of Actuators • Electrical • Ac and dc motors • Stepper motors • solenoids • Hydraulic • Use hydraulic fluid to actuate motion • Pneumatic • Use compressed air to actuate motion
Current State of Actuators • All three types of actuators are in use today • Electric actuators are the type most commonly used • Hydraulic and pneumatic systems allow for increased force and torque from smaller motor • There are some dual function actuators • i.e. rotation and translation
Linear Actuator Used for all Automation • Actuators are used everywhere there is automation • robot, conveyor system, etc. Rotary Electric Motor Actuator
Where Used • Electric motors used for high precision • Precise robot applications such as automotive and pharmaceutical • Now up to 10,000 lbf • Hydraulic actuators used for increased torque • High force and torque applications up to 32,000 lbf • High precision achievable • Pneumatic actuators are used for lower cost and lower precision applications
Specifications – Electric Motors • AC Electric Motor price range • $100 to $7,100 • ¼ HP to 100 HP • 19lbs to 1429lbs • 1800 rpm • 120 to 230 input voltage • Up to 1024 pulses per revolution
Specifications – Electro Hydraulic • high force-density, precise control, and long operating life • Thrusts from 500 to 32,000 pounds force @ 2,500 psi • Stroke lengths ranging from fractions of an inch to 40 inches • Can provide up to 448,000 lb.ins torque, and are typically used as valve actuators in the rotary actuator format • linear actuator travel is from 0.005 to 6 inches per second • Resolution can be as fine as 0.002 inches accuracy with 100% repeatability
Hydraulic Controlled Arm • Marvin Minsky developed the Tentacle Arm, which moved like an octopus. It had twelve joints designed to reach around obstacles. A PDP-6 computer controlled the arm, powered by hydraulic fluids. Mounted on a wall, it could lift the weight of a person
Supporting Equipment • Amplifier or driver Unit • Amplify electric power coming from controller • $30 to $3,500 • Encoder • Identify location of motor • Gripper, conveyor, rollers, or other actuation devices
Standards • Standards Based on application • Cheap low quality actuators • Expensive high quality high precisions actuators • Torque and force requirements • Position holding when not moving
Major Vendors • Electric Motors • Marathon Electric • Automation Direct • Solenoid • DECCO • Hydraulic Systems • M-MAC Actuators • PHD Inc. • Pnuematic • Parker
Technical Paper - High Torque to Weight Ratio Robot Actuator • Hydrostatic system • Advantages: High torque, light weight, accurate torque control • Disadvantage: extra dynamics to be accounted for
Model of Motor Dynamics • Model of the motor dynamics • Tp = torque from motor windings • q = fluid flow rate • q = angular displacement • D = q/q • b = coefficient of viscous friction • Ts = Coulomb friction due to seals and bearings • J = inertia of the coupled pump and motor rotors • F(p1+p2) = Coulomb friction term, increases linearly with pressure
Achievements • Brushless dc 6000 rpm motor was used • 40 in-lb peak torque output • Hydraulic transmission ratio 484.7:1 • Theoretical peak torque = 19,388 in-lb • Max output speed 12.4 rpm • Actual peak torque = 7300 in-lb due to 2000 psi limitation on internal seals
Class Application • What is the resolution of the ac motor with 1024 pulses per revolution • Resolution = 360o/1024 = 0.351o/pulse
Video of Robot Leg Bends • Movement accomplished by electric motors • Power transmitted to the joints via cable drives
Summary • Three major actuator types • All different types of • Applications • Need good precision, electrical actuator • Need large forces, hydraulic actuator • Low cost, pneumatic actuator • Note: can get high precision expensive pneumatic actuators
References • www.adept.com • www.mmacactuators.com • web6.automationdirect.com • www.phdinc.com • www.parker.com • www.robotics.com • www.computerhistory.org • www.ai.mit.edu/projects/leglab/robots • Bobrow and Desai, A high torque to weight ratio robot actuator, Robotica (1995) volume 13, pp. 201-208, Cambridge University Press