
Linear Control Based on Instantaneous Linearization Methodology
E N D
Presentation Transcript
Control Based on Instantaneous Linearization Eemeli Aro eemeli.aro@tkk.fi 16.11.2005
Structure • Rationale • Instantaneous linearization • Controller implementation • Discussion
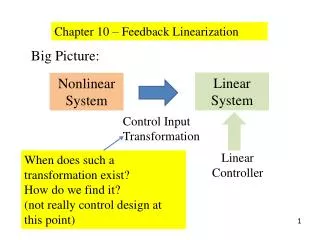
Rationale • Linear control better understood than nonlinear control • Many well-established linear design techniques exist • Linearization only valid in a limited operating range • Extract a linear model from the current sample
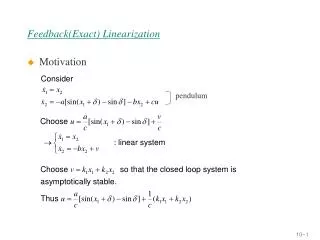
Instantaneous linearization Assume a deterministic neural network input-output model is available with a regression vector which is interpreted to define the state of the system
Instantaneous linearization Then linearize g around (t=) to get an approximate model where
Instantaneous linearization Separating components of the current regression vector () into a bias term () : where
Instantaneous linearization The coefficients {ai} and {bi} are collected into the polynomials Thus the approximate model can be seen as a linear model affected by a constant disturbance ()
Instantaneous linearization For a multilayer perceptron network with one hidden layer on tanh units and a linear output,
Linearized model parameters Extract linear model Control design Controller Parameters Reference Input Output Controller System Application to Control
Application to Control • At each sample, extract a linear model from a neural network model of the system and design a linear controller • Can be seen as a gain scheduling controller with an infinite schedule
Application to Control • Structurally equivalent to an indirect self-tuning regulator, only difference is in how the linear model is extracted • Control design based on certainty equivalence principle – the controller is designed assuming that the linear model perfectly describes the system
Application to Control • Can implement any linear control design • Need to compensate for bias term () • e.g. by using integral action, which also compensates for other constant disturbances • Need to keep in mind narrow operating range of linearized model
Application to Control • Pole placement design • Assuming a linearized deterministic model • The objective is to select the three polynomials R, S, and T so that the closed loop system will behave as
reference + input output – System Application to Control
Application to Control • Minimum variance design • For regulation, not trajectory following • Design the controller to minimize a criterion J(t) • Generalized Minimum Variance controller where P, W and Q are rational transfer functions
Discussion • Pro • Allows the use of linear design techniques • Reasonably simple implementation • Fast; linearization & design can be done between samples • Allows control of systems with unstable inverses (with approximate pole placement controller design without zero cancellation) • Can be used to understand the dynamics of the system (poles, zeros, damping, natural frequency)
Discussion • Con • Linearized model often valid only in a narrow range • Can’t deal with hard nonlinearities • Requires understanding on linear control theory
References • M. Nørgaard, O. Ravn, N. K. Poulsen, and L. K. Hansen, "Neural Networks for Modelling and Control of Dynamic Systems," Springer-Verlag, London, 2000 • O. Ravn, "The NNCTRL Toolbox. Neural networks for control", Version 2, Technical University of Denmark, 2003, http://www.iau.dtu.dk/research/control/nnctrl.html