Introduction to Feedforward Control Techniques in Process Control
Learn about feedforward control, a technique that anticipates disturbances in chemical processes before they affect the output, ensuring better control. Understand its advantages, disadvantages, and how it complements feedback control. Explore its design, benefits, and challenges in practical applications.

Introduction to Feedforward Control Techniques in Process Control
E N D
Presentation Transcript
Feedforward Control Prof. Ing. Michele MICCIO Dip. Ingegneria Industriale (Università di Salerno) ProdalScarl (Fisciano) adapted from Romagnoli & Palazoglu’sChapter 16: Model-Based Control see also Stephanopoulos,1984 Chapter 21 §21.1-4 rev. 3.4 of April 30, 2019
Introduction to Model-Based Control In this course we consider the following control design techniques that explicitly use the process model: • Delay Compensation (Smith Predictor) • Inverse Response Compensation • Feedforward control • Model Predictive Control (MPC) Romagnoli & Palazoglu, “Introduction to Process Control “
Detailed Process Understanding Intelligent Use of Modern Control Systems Improved Profitability $ Introduction to Model-Based Control Definition of Model-Based Control Combination of detailed process understanding (advanced mathematical modeling) with the intelligent use of modern control systems (hardware, software and technology). Romagnoli & Palazoglu, “Introduction to Process Control “
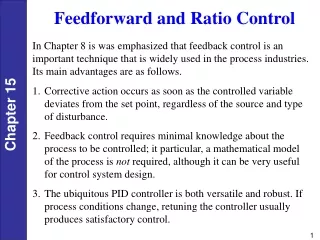
Disturbance Manipulated variable Controlled variable Set-point Process Controller Back to Feedback Control • Feedback control can never achieve perfect control of a chemical process. It reacts to the changes in the controlled variable after a deviation is detected in the output. Sensor Romagnoli & Palazoglu, “Introduction to Process Control “
Feedforward Control • A feedforward controller measures the disturbance directly and takes control action to compensate for its eventual impact on the output variable. • Feedforward controllers have the theoretical potential for perfect control. Romagnoli & Palazoglu, “Introduction to Process Control “
Controller Process Feedforward Control Consider the following feedforwardflow of information about disturbance … Disturbance Set point Controller output Final control element Feedforward Controller Controlled variable Manipulated variable the feedforward controllerpredicts the effect of disturbances Romagnoli & Palazoglu, “Introduction to Process Control “
d(s) gd(s) m(s) y(s) gp(s) Feedforward Control Design We want to achieve the following control objective: y(t) = ysp(t) Therefore, in the Laplace domain: Process We shall require perfect control : 1 Romagnoli & Palazoglu, “Introduction to Process Control “
disturbance measurement y y sp sp d + − g g g 1 1 1 g g g md md md ff ff ff g g gd 2 2 2 g g g ff ff ff + y y + g g g g g g f f f p p p final control element Feedforward Control Design We introduce a suitable structure for the feedforward controller. Then, we further determine m(s) from the block algebra: 2 3 process vs. disturbance actual feedforward controller o m process Romagnoli & Palazoglu, “Introduction to Process Control “
Feedforward Control • The feedforward control elements are notconventional controllers (P, PI or PID) • The feedforward controller: • needs the gff1 block in order to make the set point comparable to the measured disturbance • depends on the knowledge of process and disturbance models • can be developed for more than one disturbanceand for multiple controlled variables Romagnoli & Palazoglu, “Introduction to Process Control “
Feedforward vs Feedback Feedforward - Advantages • Acts before disturbances affect the process • Cannot cause instability • Good for slow process dynamics Feedforward - Disadvantages • Must identify and measure ALL disturbances • Fails for unmeasured disturbances • Needs to have a reliable process dynamic model • Fails for changes within the process • No indication of control quality Romagnoli & Palazoglu, “Introduction to Process Control “
Feedforward vs Feedback • Feedback - Advantages • No disturbance measurements needed • Limited or even no process model needed • Can cope with changes within process • Feedback - Disadvantages • Will always be some error • Poor for slow process dynamics, interaction, etc. • Instability is possible Romagnoli & Palazoglu, “Introduction to Process Control “
Feedforward-Feedback Control Use a combination of Feedforward and Feedback control • We expect that a combined feedforward-feedback control system will retain, • The superior performance of a feedforward controller, and • The insensitivity of the feedback controller to uncertainties in model and inaccuracies in model parameters. Romagnoli & Palazoglu, “Introduction to Process Control “
Example 1:Process with dead time Consider the following process TFs: gmd and gf purely algebraic • Design a Feedforward Controller • Compare with PI feedback design Romagnoli & Palazoglu, “Introduction to Process Control “
Example 1: process with dead time(disturbance rejection) FF Controller Feedback with a PI controller No modeling error modeling error with +20% error in gdgain (Kd = 1.2) NB: Output signal = controlled variable different scales on axes ! Romagnoli & Palazoglu, “Introduction to Process Control “
Tout,sp Steam Feedforward Controller Tout Example 2: Heat Exchanger Manipulated variable Controlled variable TT FT Disturbances Design a FF controller to compensate for variations in the feed flow rate and temperature. Romagnoli & Palazoglu, “Introduction to Process Control “
Example 3 Distillation Column Design a FF controller to compensate for variations in feed composition and flow rate. Manipulated variable Disturbances Controlled variable CT FT Cout,sp FF Controller Romagnoli & Palazoglu, “Introduction to Process Control “