Controller design by R.L.
Controller design by R.L. Typical setup:. This is the R.L. eq. With no z i , p i , controller design means to pick good K for R.L. Those z i , p i means to pick additional poles /zeros to R.L. Proportional control design. Draw R.L. with given

Controller design by R.L.
E N D
Presentation Transcript
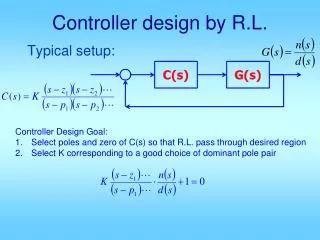
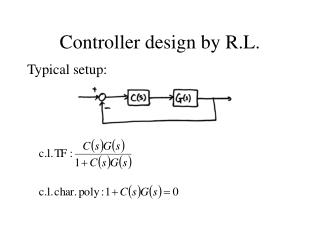
Controller design by R.L. Typical setup:
This is the R.L. eq. • With no zi, pi, controller design means to pick good K for R.L. • Those zi, pi means to pick additional poles /zeros to R.L.
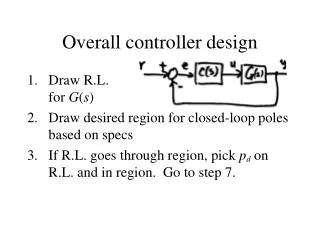
Proportional control design • Draw R.L. with given • Pick a point on R.L. to be desired c.l. pole: PD • Compute
When to use: If R.L. of G(s) goes through the region for desired c.l. poles What is that region: • From design specs, get desired Mp, ts, tr, etc. • Use formulae for 2nd order system to get desired ωn , ζ, σ, ωd • Identify these in s-plane
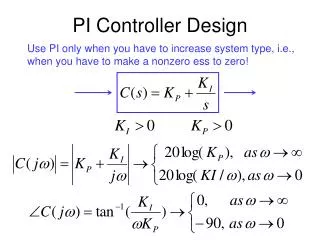
Example: When C(s) = 1, things are okay But we want initial response speed as fast as possible; yet we can only tolerate 10% overshoot. Sol: From the above, we need that means:
This is a cone around –Re axis with ±60° area We also want tr to be as small as possible. i.e. : want ωn as large as possible i.e. : want pd to be as far away from s = 0 as possible • Draw R.L. • Pick pd on R.L. in cone & | pd | max
Example: • Want: , as fast as possible • Sol: • Draw R.L. for • Draw cone ±45° about –Re axis • Pick pd as the cross point of the ζ = 0.7 line & R.L.
Controller tuning: • First design typically may not work • Identify trends of specs changes as K is increased.e.g.: as KP , pole • Perform closed-loop step response • Adjust K to improve specse.g. If MP too much, the 2. says reduce KP
PD controller design • This is introducing an additional zero to the R.L. for G(s) • Use this if the dominant pole pair branches of G(s) do not pass through the desired region
Design steps: • From specs, draw desired region for pole.Pick from region. • Compute • Select • Select:
Example: Want: Sol: (pd not on R.L.) (Need a zero to attract R.L. to pd)
Closed-loop step response simulation: » ng = [1] ; » dg = [1 2 0] ; » nc = [Kp, Kd] » n = conv(nc, ng) ; » d = dg + n ; » stepspec(n, d) ; Tuning: for fixed z: Q: What’s the effect of tuning z?
Drawbacks of PD • Not proper : deg of num > deg of den • High frequency gain → ∞: • High gain for noise Saturated circuits cannot be implemented physically
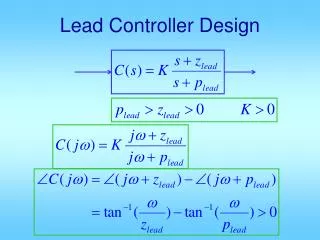
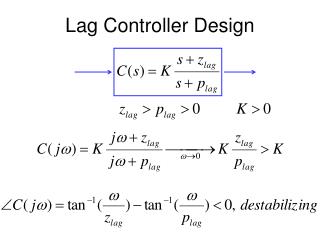
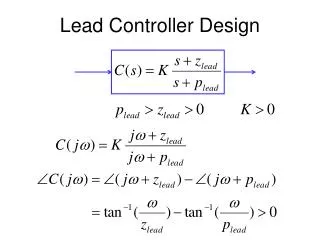
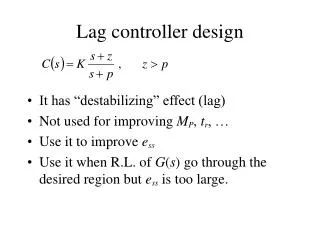
Lead Controller • Approximation to PD • Same usefulness as PD • It contributes a lead angle:
Lead Design: • Draw R.L. for G • From specs draw region for desired c.l. poles • Select pd from region • LetPick –z somewhere below pd on –Re axisLetSelect
There are many choices of z, p • More neg. (–z) & (–p) → more close to PD & more sensitive to noise, and worse steady-state error • But if –z is > Re(pd), pd may not dominate
Example: Lead Design MP is fine, but too slow. Want: Don’t increase MP but double the resp. speed Sol: Original system: C(s) = 1 Since MP is a function of ζ, speed is proportional to ωn
Draw R.L. & desiredregion Pick pd right at the vertex: (Could pick pd a little inside the region to allow “flex”)
Clearly, R.L. does not pass through pd, nor the desired region.need PD or Lead to “bend” the R.L. into region.(Note our choice may be the easiest to achieve) Let’s do Lead:
The new R.L. closed-loop has pole pair at pd & pd* but the 3rd pole is at somewhere (-1, 0) Which one is better?