Download
1 / 6
60 likes | 95 Vues
Implement modular field IOCs with EPICS on Linux for motion control using linear and rotary position sensors. Utilize off-the-shelf integrated industrial computer systems with ADCs and RS-232 interfaces. Develop servo motors with RS-232 for precise translation of undulator segments and camshafts. Achieve high repeatability and resolution with Novotechnik linear and rotary sensors. Current status includes completed development of SmartMotor drive unit test, progress on camshaft motion control system, and pending client tools development.

E N D
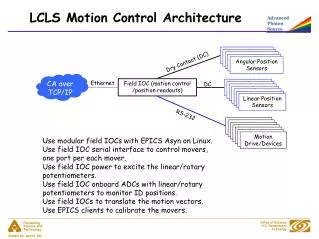
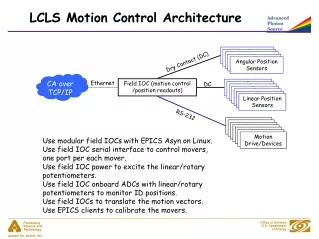
LCLS Motion Control Architecture Angular Position Sensors Angular Position Sensors Angular Position Sensors Angular Position Sensors Angular Position Sensors Dry Contact (DC) CA over TCP/IP Ethernet Field IOC (motion control /position readouts) Linear Position Sensors DC Linear Position Sensors Linear Position Sensors Linear Position Sensors Linear Position Sensors Linear Position Sensors Linear Position Sensors RS-232 Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices Motion Drive/Devices • Use modular field IOCs with EPICS Asyn on Linux. • Use field IOC serial interface to control movers, one port per each mover. • Use field IOC power to excite the linear/rotary potentiometers. • Use field IOC onboard ADCs with linear/rotary potentiometers to monitor ID positions. • Use field IOCs to translate the motion vectors. • Use EPICS clients to calibrate the movers.
Field IOC Field IOC’s: Off-the-shelf Integrated Industrial Computer Systems (PC-104 based) with 16 ADC’s (16-bit) for position readouts and 8 RS-232 for motion controls. RT OS: Linux. EPICS 3.14.x w/ Asyn module. Prometheus w/16x16 bit ADCs, Diamond Systems Inc. Size: 5.5”x5.75”x1.7”. Power: 5W. Each ID/Cradle Assembly has one Field IOC
Motion Device Motion Drive/Devices: Servo Motors with RS-232 interfaces. SmartMotors from Animatics Corporations 2 for undulator segment translation. 5 for cradle assembly camshafts.
Linear Position Feedback Linear Position Sensors: Absolute position feedback with 2 microns repeatability and 0.2 micron resolution. Linear transducers (w/2-micron repeatability) from Novotechnik US, Inc. 2 for undulator segment translation and 8 for cradle assembly. With 16 bit readout, the resolution is 0.15 micron.
Rotary Position Feedback Rotary Position Sensors: Absolute position feedback with 0.1 degree repeatability and 0.01 degree resolution. Rotary transducers (w/0.004 degree repeatability) from Novotechnik US, Inc. 5 for cradle assembly camshafts. With 16 bit readout, the resolution is 0.005 degree.
Current Status • Asyn/EPICS/Linux based Field IOC SmartMotor drive development: Completed. • Motor drive unit test: Completed. • Cam Shaft motion control and position feedback system development: In progress. • Client (calibration) tools development: Pending. • Development environment setup: In progress. • Verification environment: Pending. • Network mgnt: Pending. Interface with SLAC IT. • Configuration mgnt: Pending. Interface with LCLS global ctls. • System and network verification: Pending. • Documentation: On going.