Download

1 / 7
80 likes | 181 Vues
Explore the local structure of continuous variables using linear Gaussian models in the context of temperature sensor data, door temperature scenarios, and robot localization with Fox, Burgard, and Thrun's nonlinear Gaussian motion model.

E N D
Representation Probabilistic Graphical Models Local Structure Continuous Variables
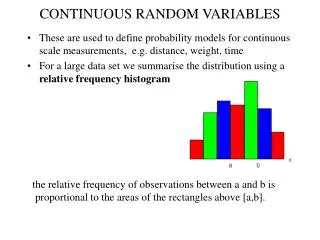
Continuous Variables Temperature Sensor Door Temperature’ Outside Temp if D=0 if D=1
Linear Gaussian . . . X1 X2 Xk Y
Conditional Linear Gaussian . . . A X1 X2 Xk Y
Robot Localization Fox, Burgard, Thrun