Download
1 / 2
20 likes | 43 Vues
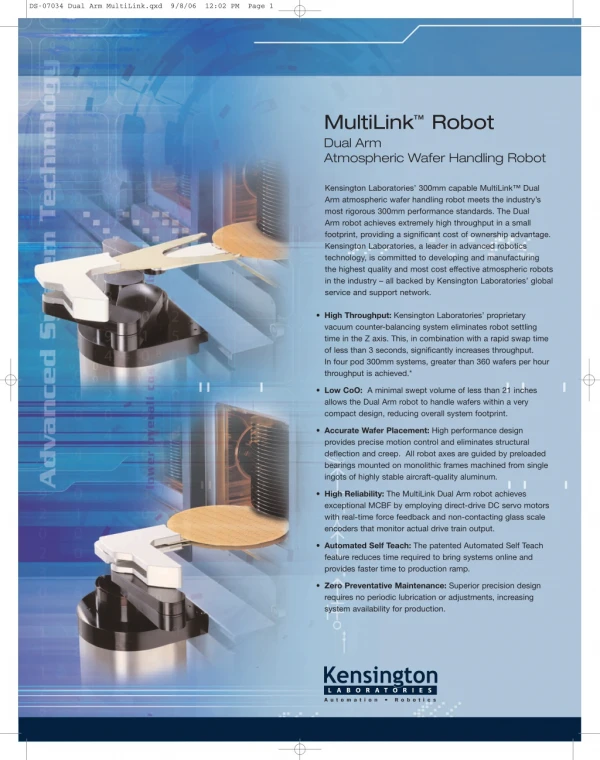
Kensington Laboratories, a leader in advanced roboticsu00a0technology, is committed to developing and manufacturingu00a0the highest quality and most cost-effective atmospheric robots in the industry u2013 all backed by Kensington Laboratoriesu2019 global service and support network.

E N D
DS-07034 Dual Arm MultiLink.qxd 9/8/06 12:02 PM Page 1 MultiLink™Robot Dual Arm Atmospheric Wafer Handling Robot Kensington Laboratories’ 300mm capable MultiLink™ Dual Arm atmospheric wafer handling robot meets the industry’s most rigorous 300mm performance standards. The Dual Arm robot achieves extremely high throughput in a small footprint, providing a significant cost of ownership advantage. Kensington Laboratories, a leader in advanced robotics technology, is committed to developing and manufacturing the highest quality and most cost effective atmospheric robots in the industry – all backed by Kensington Laboratories’ global service and support network. • High Throughput: Kensington Laboratories’ proprietary vacuum counter-balancing system eliminates robot settling time in the Z axis. This, in combination with a rapid swap time of less than 3 seconds, significantly increases throughput. In four pod 300mm systems, greater than 360 wafers per hour throughput is achieved.* • Low CoO: A minimal swept volume of less than 21 inches allows the Dual Arm robot to handle wafers within a very compact design, reducing overall system footprint. • Accurate Wafer Placement: High performance design provides precise motion control and eliminates structural deflection and creep. All robot axes are guided by preloaded bearings mounted on monolithic frames machined from single ingots of highly stable aircraft-quality aluminum. • High Reliability: The MultiLink Dual Arm robot achieves exceptional MCBF by employing direct-drive DC servo motors with real-time force feedback and non-contacting glass scale encoders that monitor actual drive train output. • Automated Self Teach: The patented Automated Self Teach feature reduces time required to bring systems online and provides faster time to production ramp. • Zero Preventative Maintenance: Superior precision design requires no periodic lubrication or adjustments, increasing system availability for production.
DS-07034 Dual Arm MultiLink.qxd 9/8/06 12:02 PM Page 2 MultiLinkTMDual Arm Robot Specifications Repeatability Radial axis Theta axis Z axis Maximum Velocity Radial axis Theta axis Z axis Maximum Acceleration Radial axis Theta axis Z axis Range of Motion Radial axis ±0.001" (±0.025 mm) ±0.01 degrees ±0.001" (±0.025 mm) Transmissive beam wafer mapping 34 inches/sec (0.86 m/sec) 1000 degrees/sec 18 inches/sec (0.46 m/sec) Key Features • Minimal swept volume of less than 21 inches • Patented edge grip technology • Patented Automated Self Teach • Transmissive beam wafer mapping • Advanced wafer cassette error detection • Direct drive technology • Continuous rotation • State-of-the-art motion control • Machine tool quality construction • High resolution optical encoders on all axes • Reduced-wear Z axis vacuum counter balance 400 inches/sec2(10.16 m/sec2) 5000 degrees/sec2 80 inches/sec2(2.03 m/sec2) Two links at 5.25" or 7.00" (133.35 mm or 177.80 mm) Continuous 11.25", 14.25", 20.25" (285.75 mm, 361.95 mm, 514.35 mm) Theta axis Z axis Reliability MCBF Compliance S2 General Specifications Swap time Maximum Z axis load Z drop (distance and time) Cleanliness Weight Vacuum required Power required Mapper Communications Mounting Specifications Overall dimensions 10 million cycles Key Patents S2-93A • Dual End Effector, Multiple Link Robot Arm System with Corner Reach-around and extended Reach Capabilities, 5765444 • High Torque, Synchronously Operating Multiple Link Robot Arm Mechanism, 6098484 • Continuously Rotatable Multiple Link Robot Arm Mechanism, 5741113 • Robot Arm with Specimen Edge Gripping End Effector, 6256555 • Robot Arm with Specimen Sensing and Edge Gripping End Effector, 6275748 • Self-Teaching Robot Arm Position Method, 6360144 <3 seconds 8 lbs (3.64 kg) With vacuum <1 mil; without vacuum <7 mils ISO Class 1 Robot: 110 lbs (50 kg); Controller: 19 lbs (8.64 kg) 10 l/min at 635 mm Hg (25 SCFH at 25" Hg) 100-220 VAC 47-63 Hz (600W PS) Throughbeam standard; reflective optional RS232, IEEE-488, or Device Net™ Mounting face: 22.2" (563.88 mm) to bottom of can; robot can diameter: 9.72" (246.89 mm); robot hole diameter: 10.00" (254 mm) Side or top mount Top mount: 3 x 1/4-20 x 0.50" DP equally spaced on a 10.375" (263.53 mm) bolt circle 20.2" (513.08 mm) 6 x #2-56 on a 1.625" (41.28 mm) bolt circle Robot mounting type Bolt pattern Options Minimum swept radius End effector • Vacuum end effectors (200mm and 300mm) • E-diagnostics with GUI • Integral prealigner Specifications are subject to change without notice. *Throughput data is calculated without prealignment. 510-620-0235 ext 718 or visit www.kensingtonlabs.com FM27207 © 2006 Kensington Laboratories, LLC. All rights reserved. Automatic Door Opener is a trademark of Kensington Laboratories. The Kensington logo is a registered trademark of Kensington Laboratories. All other trademarks are property of their respective owners. DS-07034