Priority Inversion
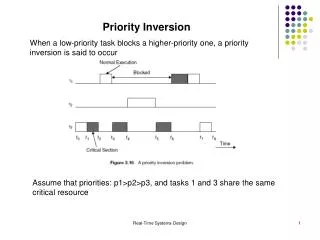
Priority Inversion. Higher priority task is blocked by a lower priority one. May be caused by semaphore usage, device conflicts, bad design of interrupt handlers, poor programming and system design. Problems with Priority Inheritance. Nested critical regions

Priority Inversion
E N D
Presentation Transcript
Priority Inversion • Higher priority task is blocked by a lower priority one. • May be caused by semaphore usage, device conflicts, bad design of interrupt handlers, poor programming and system design.
Problems with Priority Inheritance • Nested critical regions • PI protected critical regions should not contain inheriting blocking operations • Mixed inheriting and non-inheriting operations • PI protected critical regions should not contain non-inheriting blocking operations either • Performance • PI protected critical regions must be relatively costly in terms of compute time or they perform worse than the simplest alternative (disable all preempts during the critical region). • Operating system performance • PIP adds significant complexity to the operating system
Other Solutions to Priority Inversion • Make the operation using the resource atomic and fast • Remove the contention • Explicitly schedule the operations according to priority
RT O/S Strategies • Add non-real-time services to a real-time kernel (e.g., VXworks, QNX) • Modify a standard kernel to make it pre-emptable (e.g., RT-IX) • A simple real-time executive runs a non-real-time kernel as its lowest priority task, using a virtual machine layer to make the standard kernel pre-emptable (e.g., RT-Linux)
RT-Linux Approach to Real-Time • RT kernel runs non-RT Linux as the lowest priority • Interrupts are handled by the RT kernel and passed to the Linux task when no RT tasks • Software emulates the interrupt control hardware for non-RT Linux • Interrupts are queued up
RT-Linux Approach to Real-Time • RT and non-RT tasks communicate through lock-free queues and shared memory • Queues accessed like character devices via POSIX read/write/ioctl calls • Shared memory accessed via POSIX mmap calls • Non-RT Linux used for • Booting, device drivers, networking, file systems, Linux process control
RT-Linux Approach to Real-Time • Worst case interrupt latency on 486/33 Mhz PC is < 30 microsec • Example application: data acquisition • RT task with polling or interrupts • Non-RT task for logging, display, networking • Queue to transfer data from RT task to non-RT task
RT-Linux Approach to Real-Time • Design premise 1: Keep the RT kernel simple • No dynamic memory allocation • No address space protection • Fixed priority scheduler • No protection against impossible schedules • Synchronization between RT tasks with hard interrupt disabling and shared memory • FIFO queues connect RT tasks to non-RT tasks • Use non-RT Linux for other operations
RT-Linux Approach to Real-Time • Design premise 2: Keep RT kernel flexible • Modules can be replaced • E.g., alternative scheduling (EDF, RM) • E.g., semaphore module • Runtime reconfigurable • E.g., Can run tests with different scheduling
What is POSIX? (Ch. 10, Shaw) IEEE’s Portable Operating System Interface for Computer Environments, which supports: • Threads • Mutexes • Semaphores • Shared Memory • Messages • Signals • Clocks & Timers • Asynchronous I/O • Memory Locking
POSIX.1c function calls • pthread_attr_setstackaddr • pthread_attr_setstacksize • pthread_cancel • pthread_cleanup_pop • pthread_cleanup_push • pthread_condattr_destroy • pthread_condattr_getpshared • pthread_condattr_init • pthread_condattr_setpshared • pthread_cond_broadcast • pthread_cond_destroy • pthread_cond_init • pthread_cond_signal • pthread_cond_timedwait • pthread_cond_wait • pthread_atfork • pthread_attr_destroy • pthread_attr_getdetachstate • pthread_attr_getinheritsched • pthread_attr_getschedparam • pthread_attr_getschedpolicy • pthread_attr_getscope • pthread_attr_getstackaddr • pthread_attr_getstacksize • pthread_attr_init • pthread_attr_setdetachstate • pthread_attr_setinheritsched • pthread_attr_setschedparam • pthread_attr_setschedpolicy • pthread_attr_setscope
POSIX.1c function calls • pthread_mutexattr_setprioceiling • pthread_mutexattr_setprotocol • pthread_mutexattr_setpshared • pthread_mutex_destroy • pthread_mutex_init • pthread_mutex_lock • pthread_mutex_trylock • pthread_mutex_unlock • pthread_once • pthread_self • pthread_setcancelstate • pthread_setcanceltype • pthread_setschedparam • pthread_setspecific • pthread_sigmask • pthread_testcancel • pthread_create • pthread_detach • pthread_equal • pthread_exit • pthread_getschedparam • pthread_getspecific • pthread_join • pthread_key_create • pthread_key_delete • pthread_kill • pthread_mutexattr_destroy • pthread_mutexattr_getprioceiling • pthread_mutexattr_getprotocol • pthread_mutexattr_getpshared • pthread_mutexattr_init