Download
1 / 15
150 likes | 181 Vues
This paper discusses the design and performance of the LHCb Vertex Locator (VELO) in the harsh radiation environment of the LHC. The VELO is responsible for the reconstruction of interaction and decay vertices of B hadrons, and this paper presents the mechanical design, sensor placement, and performance optimization of the VELO.

E N D
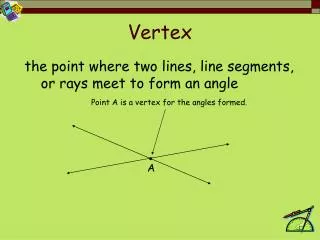
The LHCb VErtex LOcator Tracking, Vertexing and Triggering in a harsh radiation environment Doris Eckstein, CERN 9th Pisa meeting on advanced detectors
The LHCb Experiment • Dedicated to the study of CP violation in the B system • LHC: -pp collisions @ 14TeV • -full spectrum of B hadrons ( ) • -high intensity: • LHCb: -single arm spectrometer • -15-300mrad angular acceptance • -recently optimised to minimise • material Vertex Locator 9th Pisa meeting on advanced detectors
Downstream Interaction region ~1m The requirements for the VELO • Reconstruction of pp interaction vertex • wide spread of interaction region in z (sz=5.3cm) • many stations around z=0 • Reconstruction of b-hadron decay vertex • short track extrapolation distances • measure at smallest radii • minimal multiple scattering • minimise material between interaction and • first measured point • VELO is the tracker before the LHCb magnet • Angular coverage of full downstream detector • angular range • 21 Silicon stations allowing to measure at least 3 hits/track • 2 R- and 2 F-measuringsensors per station • overlap (acceptance, alignment) 9th Pisa meeting on advanced detectors
The VELO Design Mechanical design as consequence of these criteria • VELO sensors as close as possible to beam • no beam pipe, sensors ~7mm away from beam • Injection: larger aperture required retraction by 30mm • Protect sensors against RF pickup from the LHC beam • Protect the LHC Vacuum from possible outgasing of detector modules • Place sensors in a secondary vacuum: Roman pots 9th Pisa meeting on advanced detectors
outer corrugations beam F sensors R sensors inner corrugations Secondary Vacuum – RF Foil • Made from 250mm thick Al • Inner corrugations : • Minimal material before the first • sensor is hit • Outer corrugations: • allow for overlap of detector halves • for full azimuthal coverage and for • alignment • Prototyping at NIKHEF • method: Hotgas Forming • full size foil • vacuum tight and stiff 9th Pisa meeting on advanced detectors
More requirements for the VELO • Rejection of multiple interactions in L0 Trigger • additional VETO stations upstream of • interaction point • Fast stand-alone tracking and vertexing for L1 Trigger • motivates R-and F-measuring sensors • Design allows to optimise resolution vs. • number of channels • Baseline design of sensors: • Active area 8mm to 42 mm • R measuring sensors: • division into 45o sectors • F measuring sensors: • inner/outer region • increasing pitch from inner towards outer radii • 2nd metal layer to route signal to chips 9th Pisa meeting on advanced detectors
Example: 2D tracks in 45o z-vertex histogram sz~70mm xy-vertex sx,y~30mm Second Level Vertex Trigger • Forward flight direction of B: Rz impact parameter • First step: 2D • -build Triplets of clusters in R sensors • -form tracks in Rz • -fill z-vertex histogram • -preselect large impact parameter • tracks in Rz • -match to m Second step: 3D -preselected (5-10) 2D tracks -add information from F sensors for 3D reconstruction -match to L0 and TT 9th Pisa meeting on advanced detectors
New 45o Old 90o 200mm sensor Resolution (mm) Optimisation of VELO sensor design • L1 Trigger: speed, number of ghost tracks • sector division • Clustering/tracking efficiency: Signal to Noise • strip length • Options of design studied (keeping constant number of strips) • Different strip pitches • Does impact parameter • resolution suffer? • max. 5% • design chosen with gradual • increase of pitch (40mm • to 103mm) 9th Pisa meeting on advanced detectors
Middle station Far station Even more requirements for the VELO This detector has to operate in an extreme radiation environment • Maximum irradiation per station: • 5x1012 to 1.3x1014 neq/cm2/year • Strongly non-uniform dependence on R and station (z) • Maintain a good S/N performance for at least 2 years (replacement) • Extensive R&D program to select • Sensor and Front-End chip 9th Pisa meeting on advanced detectors
Prototype testing in Lab and Test beam Test beam: CERN SPS (120 GeV p and m) Irradiated Not irradiated Irradiated Not irradiated DELPHI-ds sensor Irradiated/Not irradiated PR03 sensors 9th Pisa meeting on advanced detectors
Tests of the p-on-n prototype • Efficiency of cluster reconstruction close to track • Box size ~ efficiency • PR02 F-sensor: routing lines in outer region • none in inner region • More efficient in inner region • Less efficient in irradiated region 9th Pisa meeting on advanced detectors
P-on-n vs n-on-n • P-on-n: • -Fraction of charge in routing line • reaches 20% in outer region • -5% in inner region • -Detector has undepleted and insulating • layer after irradiation • -Expected to be less for n-on-n • Compare efficiency for p-on-n and • n-on-n for different depletion depth • P-on-n efficiency degrades fast • N-on-n efficiency ~100% for only 60% depletion depth Chose n-on-n for VELO 9th Pisa meeting on advanced detectors
Front-End chip decision • Two parallel developments: SCTA_VELO (DMILL) and Beetle (0.25mm CMOS) • Features: 128 input channels • 40MHz sampling (LHC clock) • Hybrids equipped with 16 chips tested in test beam • Decision taken at beginning of this year to use Beetle • Performance equally good • Availability, radiation hardness and usage in LHCb SCTA_VELO Beetle1.1 9th Pisa meeting on advanced detectors
Beetle chip tests • Currently Beetle1.2 under study • Test set-up in Lab with one chip reading out a n-on-n 200mm thick • prototype sensor • Sensor close to final design • Measure S/N with Sr source • Prepare for test beam: • Hybrid with 16 Beetle1.2 • chips reading out a full • sensor • MPW submission of improved • Beetle1.3 soon 9th Pisa meeting on advanced detectors
Summary & Outlook • VELO design is close to completion • Important decisions: finalised sensor design • choice of Front-End chip • Successfully tested module prototypes consisting • of Sensor, Hybrid and 16 chips • Plan to have first module end of 2003 • Complete VELO in 2006 9th Pisa meeting on advanced detectors