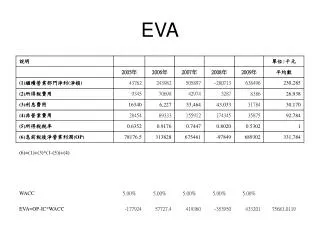
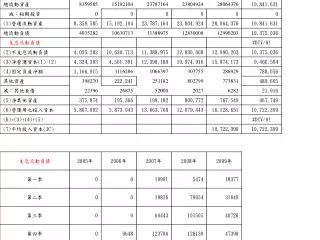
EVA
EVA. Embedded Vision Architectures. Agenda EVA meeting April-28-2010 + overview running activities. J. v. Dalfsen, April-21-2010. Agenda EVA meeting April-28-2010. Status EVA project 13.30 Status, progress report and declarations Jan van Dalfsen WG3 : EVA platform

EVA
E N D
Presentation Transcript
EVA Embedded Vision Architectures Agenda EVA meeting April-28-2010 + overview running activities J. v. Dalfsen, April-21-2010
Agenda EVA meeting April-28-2010 Status EVA project 13.30 Status, progress report and declarations Jan van Dalfsen WG3: EVA platform 13.45 EVA reference board, architecture, HW/SW content Raj Bose 14.30Project discussion and formulation required action points for creation of EVA reference boardby CHESS and partners 15.00PAUSE WG1: Vision in the loop 15.15 Achievements TU/e-application demo ZhenyuYe / Roel Pieters HW, SW, algorithms, skeletons and kernels 15.45Project discussion and formulation required action points for Vision in the loop for TU/e and partners 16.00WG2: Marker/natural feature detection 3D concepts for natural feature detcion Harry Broers Available HW, SW, algorithms, skeletons and kernels 16.30 Project discussion and formulation action points for Apptech and partners 16.45EVA architecture topicsYifanHe Presentation action points next half year Preparation for industrial application of EVA platform 17.15 Discussion OTB-,Assembléon-,BrainCenter-industrial applications Peter Brier / Sjef Horijon / WimHoeks Action points for OTB, Assembléon and BrainCenterr 18.00 CLOSURE Embedded Vision Architectures Project
Roadmap for first FPGA based EVA WG1: Vision in the loop WG2: Natural feature detection WG3: EVA Ref. board with synthetic application which integrates vision in the loop + marker detection EVA Embedded Vision Architectures Project
WG1: Vision in the loop • Zhenyu Ye (TU/e) • Deliverables: • Collect algorithms (SW+HW) for most basic functionality to start with (reuse FFoS SW): Roel Pieters, Zhenyu Ye • A framework of skeletons and a set of kernels is selected, prepared and rewritten for mapping onto FPGA by Zhenyu Ye, Yifan He • SIMD based architecture mapped on FPGA for vision in the loop: Yifan He • Vision in the loop is running on the first referenceboard with the synthetic application and interfaced with an XY stage Yifan He, Zhenyu Ye Embedded Vision Architectures Project
WG2: Marker/natural feature detection • Harry Broers (Apptech) • Deliverables: • Collect algorithms (SW+HW) for most basic functionality to start with (first reuse CHESS SW then TUD-AugR SW, UK software Apptech when time is left): Roel Pieters, Zhenyu Ye • A framework of skeletons and a set of kernels is selected and rewritten for mapping onto FPGA: Zhenyu Ye, Yifan He • SIMD based architecture mapped on FPGA for marker detection: Yifan He • Marker detection is running on the first referenceboard with a synthetic application: Yifan He, Zhenyu Ye Embedded Vision Architectures Project
WG3: EVA reference board • Raj Bose (Chess) • Deliverables: • Selected hardware/software (common for all partners): • Reference board with interfaces, periferals, (+ lightweight GPU) • Required development toolkit, operating system, compiler, etc. • First preparations for Design Space Exploration for EVA under resonsibility of TU/e staff (a.o.Postdoc) by Zhenyu Ye + Yifan He • Initial FPGA based architecture suitable for EVA component • Initial FPGA based skeletons framework • Demo of synthetic applications that integrate the results of WG1 & 2 Embedded Vision Architectures Project
Preparation for EVA vision applications from industry • OTB (Peter Brier) • Assembléon (Jef Horijon) • BrainCenter (Wim Hoeks) Embedded Vision Architectures Project
Action points previous meetings • Raj Bose sends the specs of the 2 CHESS boards • Harry Broers collects and tests the natural marker detection software from the UK • TU/e ES will check for existing skeleton IP implementations on FPGA • Kernforschungs Institut Jülich Dr. Jan Vogelbruch • NICTA (Brisbane): Abbas Bigdeli (via Kleihorst) • Peter Brier writes an overview of the ‘new’ OTB interestin the vision in the loop application and explains his discussion with Wouter Caarls • Wim Hoeks and Peter Brier to think over cooperation OTB and Braincenter for EVA project • Zhenyu Ye brings the software of Wouter Caarls up and running with the help of Wouter Caarls; Roel Pieters is looking over their shoulders • Yifan He will focus on merging the FPGA design flow into the skeleton framework of Wouter Caarls (for EVA we need FPGA mapped skeletons) • First Wouters applications are redone and played with • The next application is Roel Pieter’s application; vision in the loop • The next next application is the marker detection of Chess • The next next next application is the marker detection of Jurjen Caarls • Roel Pieters is asked to prepare demo’s of his XY table with Vision in the loop Jurjen Caarls is asked to prepare demo’s of his marker detection (or goto the KABK) Demos for Henk Corporaal, Pieter Jonker, Bart Mesman and Jan van Dalfsen (or a film of the current experimental set ups together with Zhenyu Ye) • Participation of Assembléon in WG1 (Vision in the loop) to be discussed with Roel Wessels, Jef Horijon and Sjef van Gastel (Look While Place patent Assembléon). Embedded Vision Architectures Project