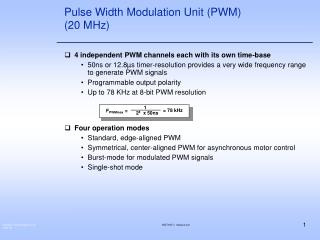
EMS1EP Lecture 8 Pulse Width Modulation (PWM)
This lecture by Dr. Robert Ross delves into the fundamental concepts of Pulse Width Modulation (PWM) and the differences between analog and digital signals. It covers the theory behind PWM, including sample circuits and demonstrations for servo control. Attendees will learn how to generate analog voltages using digital signals through DACs and ADCs, and explore practical applications of PWM in various fields such as communication and motor control. A class challenge will reinforce the concepts with hands-on coding exercises using the Arduino platform.


EMS1EP Lecture 8 Pulse Width Modulation (PWM)
E N D
Presentation Transcript
EMS1EP Lecture 8Pulse Width Modulation (PWM) Dr. Robert Ross
Analog v’s digital Theory behind PWM PWM sample circuit/Demo Worked examples Servo Control Overview (what you should learn today)
Digital Revision – Analog/Digital Analog Voltages: Continuous in time and value Digital Voltages: Discrete in time and value
Analog/Digital • The real world is analog • Most things we measure or control can be described my continuous values • Pressure, temperature, acceleration, sound, light • Computers are digital • Need to convert these analog voltages as digital values
Analog/Digital Digital Voltages Control Physical Variable (Sound, light, pressure, temp, ect) DAC Digital to Analog Converter Microcontroller (LArduino) ADC Analog to Digital Converter Physical Variable (Sound, light, pressure, temp, ect) Transducer (Sensor) Actuator Analog Voltages
ADC and DAC • Analog to Digital Converters (ADCs) are used to convert the analog voltages into a digital value • Digital to Analog Converters (DACs) are used to generate analog voltages using digital values • The LArduino board has internal ADCs and has pins which can be configured as analog outputs using Pulse Width Modulation
Quantisation • The analog values produced by a DAC look analog but are actually quantised values (not continuous) • These values are in small steps • The LArduino has 256 steps (0-255) over the range 0-5V • 19.6mV Steps (5V/255=0.0196) • To improve resolution: • Lower the voltage range (0-3V) • Increase the number of bits: • 8Bits = 255 Steps • 16Bits = 65535 Steps
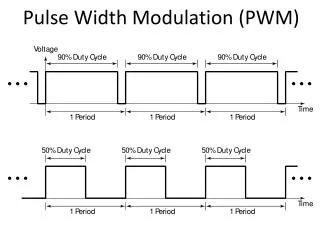
PWM Characteristics • Create a square-wave • Constant period • Varying duty cycle (proportional to required analog voltage) 5V 0V
5V 0V analogWrite(pin, 0); 0% Duty cycle - Average Voltage: 0V 5V 0V analogWrite(pin, 255); 100% Duty cycle - Average Voltage: 5V Generating Analog Voltages 5V 0V analogWrite(pin, 63); 25% Duty cycle - Average Voltage: 1.25V 5V 0V analogWrite(pin, 127); 50% Duty cycle - Average Voltage: 2.5V 5V 0V analogWrite(pin, 191); 75% Duty cycle - Average Voltage: 3.75V
Filtering PWM Signal Without filtering circuitry With filtering circuitry:
Pulse Width Modulation (PWM) • Use: • analogWrite(pin, <AnalogVoltage>); • AnalogVoltage can vary from 0-255 • Will toggle the pin really fast high and low – to produce something more like an analog voltage need to smooth this out • Use a Low Pass Filter to smooth the voltage out to approximate an analog voltage
PWM Applications • Communication – length of pulse specifies 1’s and 0’s • Voltage Regulation • LED brightness control • Controlling the speed of motors • Servo control
PWM on the LArduino • PWM can be performed on any of the pins marked with a ‘P’ • Use pins 5, 6, 9, 10, 11 • Pins used for PWM don’t need to be setup – analogWrite does this automatically
Class Challenge • Write some code to do the following: • A switch is connected to Pin 8 • A LED is connected to Pin 6 • If the button is pressed the LED should be at 75% brightness • If the button is not pressed the LED should be at 25% brightness
Worked example – Sawtooth signal • Create a sawtooth signal on Pin 5 • When connected to an LED the LED should successively fade brighter and dimmer • When connected to a scope should give output (when connected to filter):
Sawtooth - Code int PWMOUT1 = 5; // PIN ASSIGNMENTS void setup() { //PWM pins don't require initialisation } void loop() { int onTime = 0; while(onTime < 255){ onTime++; analogWrite(PWMOUT1, onTime); delay(10); } while(onTime > 0){ onTime--; analogWrite(PWMOUT1, onTime); delay(10); } }
No Filtering (Value increased and then decreased) LED connected – goes brighter then dimmer Sawtooth - Results
Servo Control Remote control aircraft (and some robotics) are operated using servos
Servo Control Servos need to be attached to pin 9 or 10 on the LArduino board Servos are controlled using a PWM signal Period: 20ms On time: 1.25 to 1.75ms On time sets the position of the servo arm
Servo Control: Hardware connections Arduino 5V Red – Power (4-6V) Black (or Brown) – GND Yellow (or White or Orange) – PWM signal pin
Servo Worked Example • If button on Pin 5 is pressed servo to go to 30O • If button is not pressed servo to go to 120O • Servo connected to Pin 9 • Using Arduino Servo library • Allows desired angle of servo to be specified
Servo Worked Example #include <Servo.h> Servo servo1; // create servo object to control a servo int button1 = 5; void setup() { servo1.attach(9); // Servo on Pin 9 pinMode(button1, INPUT); } void loop() { if (digitalRead(button1) == LOW){ //Button pressed servo1.write(30); } else{ //Button not pressed servo1.write(120); } }
Continuous Rotation Servos • By default servo motors only have about 180O of motion that they can travel over • Servos can be modified for continuous rotation (they can go right around) • PWM signal controls speed not position of continuous rotation servos • Involves: • Removing feedback potentiometer (variable resistor) • Soldering in resistors • Cutting notch out of gears
The real world is analog, but our microcontrollers are digital PWM is one type of DAC to generate analog like voltages from a microcontroller Use analogWrite() to set PWM value Servos use PWM to set the position of the servo arm – can use the servo library Summary(What you learnt in this session)