Download
1 / 24
240 likes | 326 Vues
Exploring model structures and processes in carbon cycling through time-series data analysis, transfer-functions, Kalman Filters, and EKF to enhance model accuracy and understanding for ecological research.

E N D
Developing and Testing Mechanistic Models of Terrestrial Carbon Cycling Using Time-Series Data Ed Rastetter The Ecosystems Center Marine Biological Laboratory Woods Hole, MA USA Jack Cosby Environmental Sciences University of Virginia Charlottesville, VA USA
Topics: I. What should be the focus of model development and testing efforts? II. Using transfer-function estimations to identify important system linkages III. Using the Extended Kalman Filter as a test of model adequacy that yields valuable information on how to improve model structure
Focus of model development and testing There has been an emphasis on the individual processes within models (e.g., photosynthesis, respiration, transpiration). But are differences among models because of the individual processes? Or is it because of the overall model structure (i.e., how the components are linked together)?
P L R F X Y Structure 1: L P R F X Ya Structure 2: M Yb U Pa La Xa F R Y Structure 3: Pb Xb Lb Is it the overall structure or the component processes that matters? Rastetter 2003
Same model structure, different process equation Response to a ramp in F from time 10 to 100 Rastetter 2003
P L R F X Y L P R F X Ya M Yb U Pa La Xa F R Y Pb Xb Lb Its the structure that matters!!!!!!! (i.e. how the components are linked to one another) Not the detailed process representation! Structure 1: Structure 2: Structure 3:
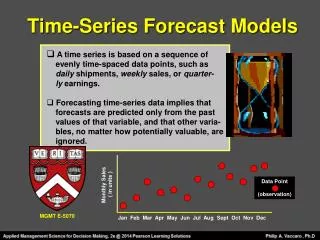
n r G e x y y F + + Testing system linkages ARMA Transfer Function Models yt = b0 xt + b1 xt-1 + ... - a1 yt-1 - a2 yt-2 - ... + 0 nt +1 nt-1 + ... - 1 rt-1 -2 rt-2 -... + et x - input time series y - output time series n - white noise time series e - error time series F - Deterministic transfer function G - Stochastic transfer function Young 1984
Input Time Series Output Time Series Deterministic function significant Combined model significant but deterministic function not significant No significant pattern Rastetter 1986
Kalman Filter • The Kalman Filter is recursive filter that estimates successive states of a dynamic system from a time series of noise-corrupted measurements (Data Assimilation) • A linear model is used to project the system state one time step into the future • Measurements are made after the time step has elapsed and compared to the model predictions • Based on this comparison and a recursively updated assessment of past model performance (estimate covariance matrix) and past measurement error (innovations covariance), the Kalman Filter updates, and hopefully improves, estimates of the modeled variables
Extended Kalman Filter • The Extended Kalman Filter (EKF) is essentially the same as the Kalman filter, but with an underlying nonlinear model • To accommodate the nonlinearity, the model must be linearized at each time step to estimate the Transition matrix • This transition matrix is used to update the estimate covariance
f Ft = J = x xt-1:t-1,ut dx = f(x, u, w) dt Nonlinear models Discrete model xt = f(xt-1, ut, wt) Linearized transition matrix Continuous model Linearized transition matrix Ft =exp(JDt) exp(JDt) = I + JDt + (JDt)2/2! +...+ (JDt)n/n! +...
t t-1 (Continuous) Extended Kalman Filter Predict xt:t-1 = xt-1:t-1 + f(x,u,0)dt predicted state Pt:t-1 = Ft Pt-1:t-1 FtT + Qt estimate covariance Update yt = zt - Ht xt:t-1 innovations St = HtPt:t-1 HtT + Rtinnovations covariance Kt = Pt:t-1 HtT St-1 Kalman gain xt:t = xt:t-1 + Kt yt updated state Pt:t = (I - Kt Ht) Pt:t-1updated estimate covariance
x1 x2 x3 xn x* = r1 r2 r3 rm Augmented State Vector • Once the Kalman Filter has been extended to incorporate a nonlinear model, it is easy to augment the state vector with some or all of the model parameters • That is, to treat some or all of the parameters as if they were state variables • This augmented state vector then serves a the basis for a test of model adequacy proposed by Cosby and Hornberger (1984)
EKF Test of Model Adequacy Cosby & Hornberger 1984 The model embedded in the EKF is adequate if: • 1) Innovations (deviations) are zero mean, white noise (i.e., no auto-correlation) • 2) Parameter estimates (in the augmented state vector) are fixed mean, white noise • 3) There is no cross-correlation among parameters or between parameters and state variables or control (driver) variables
Webb Hyperbolic Eight Models Tested by Cosby et al. 1984 O2 concentration in a Danish stream note 1 model structure, alternate representation of PS
mean value Webb Hyperbolic Webb - 1.2 Hyperbolic - 1.7 Maximum rate Webb - 3.7 Hyperbolic - 0.32 Initial slope of PI curve both - 0.51 both - 0.94 Cosby et al. 1984
All 8 models failed in the same way; parameter controlling initial slope of PI curve had a diel cycle. • Its not the details of process representation that’s crucial, its how the processes are linked to one another. Linear model “wags” as light changes All models have diel hysteresis
EKF Test of Model Adequacy • The EKF can be used as a severe test of model structure (few models are likely to pass the test) • More importantly, it yields a great deal of information on how the model failed that can be used to improve the model structure • e.g., the initial-slope parameter in the Cosby model should be replaced with a variable that varies on a 24-hour cycle, like a function of CO2 depletion in the water, or C-sink saturation in the plants
Are we getting the right type of data? Time series data are extremely expensive and therefore rare e.g., eddy flux, hydrographs, chemographs, others? Their value to understanding of ecosystem dynamics is definitely worth the expense The key to good time series data is automation to assure consistent, regular sampling There should be a high degree of synchronicity among time series collected on the same system
Conclusions: • Time series are far richer in information on system dynamics and system linkages than data derived from more conventional experimental designs (e.g., ANOVA) • Time series provide replication through time, which allows for statistical rigor without the replication constraints of more conventional experimental designs • The focus of study should be on identifying and testing the linkages among system components (i.e., the system structure) rather than the details of how the individual processes are represented
Conclusions: • Transfer-function estimation can be used to identify links among ecosystem components or test the importance of postulated linkages • The Extended Kalman Filter can be used as a severe test of model adequacy that yields valuable information on how to improve the model structure • Unfortunately, high quality time-series data in ecology are still rare • However, new expenditures currently proposed for monitoring the biosphere (e.g., ABACUS, LTER, NEON, CLEANER, CUAHSI, OOI) may provide the support to automate time-series sampling of several important ecosystem properties.