Stochastic Models in Time Series: A Comprehensive Overview
270 likes | 365 Vues
Delve into the world of stochastic models, random functions, and time series analysis. Learn about distribution properties, multivariate normal processes, and the Kolmogorov extension theorem.

Stochastic Models in Time Series: A Comprehensive Overview
E N D
Presentation Transcript
Stochastic models - time series. Random process. an infinite collection of consistent distributions probabilities exist Random function. family of random variables, {Y(t;), t Z, } Z = {0,±1,±2,...}, a sample space
Specified if given F(y1,...,yn;t1 ,...,tn ) = Prob{Y(t1)y1,...,Y(tn )yn } n = 1,2,... F's are symmetric in the sense F(y;t) = F(y;t), a permutation F's are compatible F(y1 ,...,ym ,,...,;t1,...,tm,tm+1,...,tn} = F(y1,...,ym;t1,...,tm) m+1 t = 2,3,...
Finite dimensional distributions First-order F(y;t) = Prob{Y(t) t} Second-order F(y1,y2;t1,t2) = Prob{Y(t1) y1 and Y(t2) y2} and so on
Normal process/series. Finite dimension distributions multivariate normal Multivatiate normal. Entries linear combinations of i.i.d standard normals Y = + Z : s by 1: s by r Y: s by 1Z: Nr(0,I) I: r by r identity E(Y) = var(Y) = ' s by s Conditional marginals linear in Y2 when condition on it
Other methods i) Y(t;), : random variable ii) urn model iii) probability on function space iv) analytic formula Y(t) = cos(t + ) ,: fixed : uniform on (-,]
There may be densities The Y(t) may be discrete, angles, proportions, vectors, ... Kolmogorov extension theorem. To specify a stochastic process give the distribution of any finite subset {Y(1),...,Y(n)} in a consistent way, in A
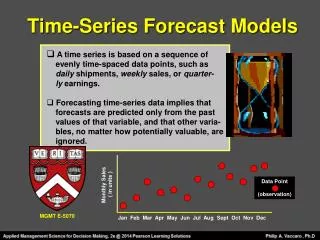
Moment functions. Mean function cY(t) = E{Y(t)} = y dF(y;t) = y f(y;t) dy if continuous = yjf(yj; t) if discrete E{1Y1(t) + 2Y2(t)} =1c1(t) +2c2(t) vector-valued case Signal plus noise: Y(t) = S(t) + (t) e.g. S(.) fixed, or random
Second-moments. autocovariance function cYY(s,t) = cov{Y(s),Y(t)} = E{Y(s)Y(t)} - E{Y(s)}E{Y(t)} non-negative definite jkcYY(tj , tk ) 0 scalars var {jY(ti)} crosscovariance function c12(s,t) = cov{Y1(s),Y2(t)}
Stationarity. Joint distributions, {Y(t+u1),...,Y(t+uk-1),Y(t)}, do not depend on t for k=2,3,... Often reasonable in practice particularly for some time stretches Replaces "identically distributed" (i.i.d.)
mean E{Y(t)} = cY for t in Z autocovariance function cov{Y(t+u),Y(t)} = cYY(u) t,u in Z u: lag = E{Y(t+u)Y(t)} if mean 0 autocorrelation function(u) = corr{Y(t+u),Y(t)}, |(u)| 1 crosscovariance function cov{X(t+u),Y(t)} = cXY(u)
joint density Prob{x < Y(t+u) < x+dx and y < Y(t) < y+ dy} = f(x,y,u) dxdy
(*) Extend to case of > 2 variables
Some useful modelsbrief switch of notation Purely random / white noise often mean 0 Building block
Random walk not stationary
Moving average, MA(q) From (*) stationary
MA(1) 0=1 1 = -.7 Estimate of (k)
Backward shift operator remember translation operator T Linear process. Need convergence condition, e.g. |i | or |i |2 <
autoregressive process, AR(p) first-order, AR(1) Markov * Linear process invertible For convergence in probability/stationarity
a.c.f. of ar(1) from (*) p.a.c.f. corr{Y(t),Y(t-m)|Y(t-1),...,Y(t-m+1)} linearly = 0 for m p when Y is AR(p)
In general case, Useful for prediction
ARMA(p,q) (B)Xt = (B)Zt
ARIMA(p,d,q). Xt = Xt - Xt-1 2Xt = Xt - 2Xt-1 + Xt-2
Yule-Walker equations for AR(p). Sometimes used for estimation Correlate, with Xt-k, each side of
Cumulants. Extension of mean, variance, covariance cum(Y1 , Y2 , ..., Yk ) useful for nonlinear relationships, approximations, ... multilinear functional 0 if some subset of variantes independent of rest 0 of order > 2 for normal normal is determined by its moments, CLT proof