Implementing Robot Navigation in Room Sequence Using IndiGolog
This project involves programming a robot to navigate through a series of rooms numbered 1 to 10 based on a given sequence of room numbers. The robot starts from one of two defined 'Start' nodes and must visit each room in the specified sequence before returning to the starting position. We'll provide a situation calculus theory to outline the domain and develop an IndiGolog program to accomplish this task. The program will be implemented in Legolog, incorporating capabilities for dynamically adding or deleting destinations during execution.

Implementing Robot Navigation in Room Sequence Using IndiGolog
E N D
Presentation Transcript
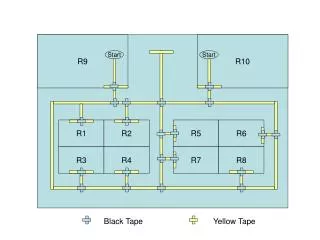
R9 R10 Start Start R1 R2 R5 R6 R3 R4 R7 R8 Black Tape Yellow Tape
Schedule a Meeting • Robot starts from one of the two ‘Start’ nodes • Room are numbered from 1 to 10 • Input (or parameters) • a sequence of room numbers such as [1,2,5], [1,4], or [5,3,7,9]; and • a number indicates its start position, i.e., 9 or 10 • Robot needs to travel to all the room in the list and finishes at where it starts.
Requirements • Provide a situation calculus theory that describes the domain. • Develop IndiGolog program(s) that can achieve the goal. • Implement the IndiGolog program in Legolog with exogenous actions for • deleting some of the destinations • adding some of the destinations