Download
1 / 28
290 likes | 392 Vues
Learn about simulated annealing, a powerful technique for convex optimization problems, guiding you through phases to find optimal solutions. This method is challenging to analyze but practical in various applications. Explore its applications in linear programming and high-dimensional convex sets.

E N D
Simulated annealing for convex optimization Adam . Kalai: TTI-Chicago Santosh Vempala: MIT Bar Ilan University 2004
100-million dollar endowment (thanks, Toyoda!) • 12 tenure-track slots, 18 visitors • On University of Chicago campus • Optional teaching • Advising graduate students
Outline Simulated annealing gives the best known run-time guarantees for this problem. It is optimal among a class of random search techniques. • Simulated annealing • A method for blind search: • f:X!, minx2X f(x) • Neighbor structure N(x) µ X • Useful in practice • Difficult to analyze • A generalization of linear programming • Minimize a linear function over a convex set S ½ n • Example: min 2x1+5x2-11x3with x12+5x22+3x32· 1 • Set S specified by membership oracle M: n! {0,1} • M(x) = 1 $ x 2 S • Difficult, cannot use most linear programming techniques [GLS81,BV02] In high dimensions
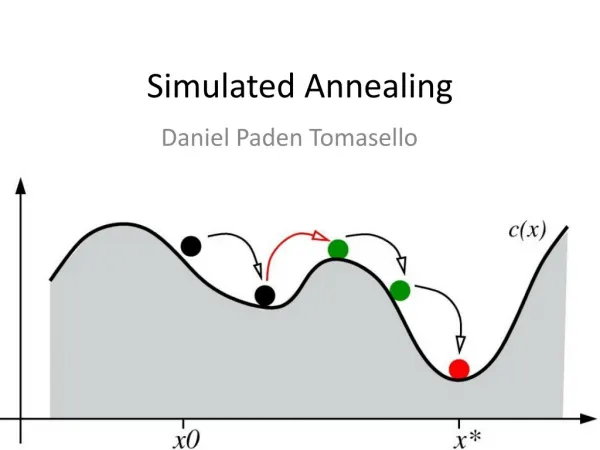
Simulated Annealing [KGV83] Phase 1: Hot (Random) Phase 2: Warm (Bias down) Phase 3: Cold (Descend) Phase 1: Hot (Random) Phase 2: Warm (Bias down) Phase 3: Cold (Descent)
Simulated Annealing • f:X!, minx2X f(x) • Proceed in phases i=0,1,2,…,m • Temperature Ti = T0(1-)i • In phase i, do a random walk with stationary distributioni:i(x) / e-f(x)/Ti • i=0: near uniform ! i=m: near optima Geometric temperature schedule Boltzmann distribution Metropolis filter for stationary dist : From x, pick random neighbor y. If (y)>(x), move to y. If (y)·(x) move to y with prob. (y)/(x)
Simulated Annealing • Great blind search technique • Works well in practice • Little theory • Exponential time • Planted graph bisection [JS93] • Fractal functions [S91]
Convex optimization minimize f(x) = c ¢ x = height x 2 S = hill Find the bottom of the hill using few pokes (membership queries) Convex and linear slope
Convex optimization minimize f(x) = c ¢ x = height x 2 S ½n = hill Find the bottom of the hill using few pokes (membership queries) • Ellipsoid method: O*(n10) queries • Random walks [BV02] O*(n5) queries Convex and linear slope n=# dimensions
Walking in a convex set Metropolis filter for stationary dist: From x, pick random neighbor y. If (y)>(x), move to y. If (y)·(x), move to y with prob. (y)/(x)
Hit and run • To sample with stationary dist. • Pick a random direction through the point • C = S Å line in direction • Take a random point from|C C S
Hit and run • Start from a point x, random from dist. • After O*(n3) steps, you have a new random point, “almost independent” from x [LV03] • Difficult analysis C S
Random walks for optimization [BV02] • Each phase, volume decreases by¼ 2/3 • In n dimensions, O(n) phases to halve distance to opt.
Annealing is slightly faster • minx 2 S c ¢ x • Use distributions: • i(x) / e-c¢x/Ti • . • After O( ) phases, halve distance to opt. • That’s compared to O(n) phases [BV02] Boltzmann distribution Geometric temperature schedule
Annealing Optimality • Assumptions: • Sequence of distributions1,2,… • Each density diis log-concave: • Consecutive densities di, di+1overlap: • Requires at least*( ) phases • Simulated Annealing does it in O*( ) phases
Lower bound idea • mean mi = Ei[c ¢ x] • variancei2 = Ei[(c ¢ x – mi)2] • overlap • lemma: mi – mi+1· (i+i+1)ln(2P) • follows from log-concavity ofi • log-concave ! P(t std dev’s from mean) < e-t • In worst case, e.g. cone, small std dev • i· (mi - min c ¢ x)/
Worst case: a cone • minx 2 S x0 • S = { x2n | -x0· x1,x2,…,xn-1· x0 · 10} • Uniform dist. on S|x0 < • mean ¼ – /n • std dev ¼/n • Boltzmann dist. e- x/ • mean ¼ n • std dev ¼ linear program
Any convex shape • Fix convex set S and direction c. • Fix mean m = E[c ¢ x] • d(x)=f(c¢x), log-concave • Conjecture:The log-concave distributionover S with largest variancei2 = Ei[(c ¢ x – mi)2] is a Boltzmann dist. (exponential dist.)
Upper bound basics • Dist i/ e-c¢x/Ti • Lemma: Ei[c ¢ x] · (minx 2 S c ¢ x ) + n|c|Ti
Upper bound difficulties • Not sufficient that distributions overlap • An expected warm start: Shape may change
Shape estimation Estimate covariance with O*(n) samples Similar issues with hit and run
Shape re-estimation • Shape estimate is covariance matrix (normalized) • OK as long as relative estimates are accurate within a constant factor • In most cases shape changes little • No need for re-estimation • Cube, ball, cone, … • In worst case, shape may change every phase • Increase run-time by factor of n • Differs from simulated annealing
Run-time guarantees • Annealing: O*(n0.5) phases • State-of-the-art walks [LV03] • Worst case: O*(n) samples per phase(for shape) • O*(n3) steps per sample • Total: O*(n4.5) (compare to O*(n10) [GLS81], O*(n5) [BV02])
Conclusions • Random search is useful for convex optimization [BV02] • Simulated annealing can be analyzed for convex optimization [KV04] • It’s opt among random search procedures • Annoying shape re-estimation • Difficult analyses of random walks [LV02] • Weird: no local minima! • Analyzed for other problems?
Reverse annealing [LV03] • Start near single point v • Idea • Sample from density / e-|x-v|/Ti in phase i • Temperature increases • Move from single point to uniform dist • Estimate volume increase each time • Able to do in O*(n4) rather than O(n4.5) • Similar algorithm analysis