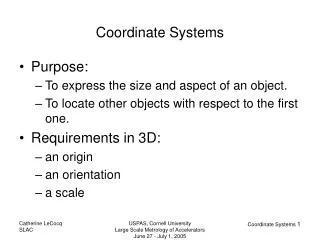
Coordinate systems in 3-D
Coordinate systems in 3-D.

Coordinate systems in 3-D
E N D
Presentation Transcript
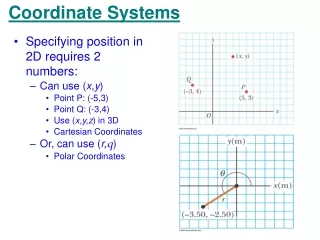
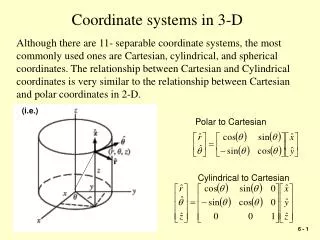
Coordinate systems in 3-D Although there are 11- separable coordinate systems, the most commonly used ones are Cartesian, cylindrical, and spherical coordinates. The relationship between Cartesian and Cylindrical coordinates is very similar to the relationship between Cartesian and polar coordinates in 2-D. (i.e.) Polar to Cartesian Cylindrical to Cartesian
Spherical Coordinates Suppose you have an object whose position is defined in spherical coordinates by the vector: Defined as the vector through the line One way to analyze this geometry is by breaking the vector into its polar and vertical components as:
Knowing that… Leads to a relationship between Spherical and Cartesian coordinates: And transformation matrices
Transformation matrices between cylindrical and spherical coordinates are given by: Transformation matrices between cylindrical and Cartesian coordinates are given by:
First, we must ask ourselves, what is ? Velocity and Acceleration in Spherical Coordinates Given that the position of a particle can be described by the vector in Spherical coordinates as: The task is to derive expressions for velocity and acceleration (i.e.) and
For simplicity, let’s first convert the unit vector from Spherical to Cartesian Coordinates: Thus, the velocity vector and its magnitude in spherical coordinates can be written as:
For the sake of completeness, let’s also write down the velocity in cylindrical coordinates and Cartesian coordinates. For example, previously we derived the velocity in 2-D polar coordinates to be In cylindrical coordinates, this becomes: The magnitude of the velocity vector in cylindrical coordinates is therefore: In Cartesian coordinates, the velocity vector is written as: The magnitude of the velocity vector in Cartesian coordinates is therefore:
For good accounting, it is best to write the time derivatives of the unit vectors in matrix form as: Doing so, will make it easier to derive an expression for acceleration in spherical coordinates, as shown below: Given this form, the magnitude of the acceleration vector can be written as:
Again for the sake of completeness, let’s also write down the acceleration vectors in cylindrical coordinates and Cartesian coordinates. For example, previously we derived the acceleration in 2-D polar coordinates to be: In cylindrical coordinates, this becomes: The magnitude of the velocity vector in cylindrical coordinates is therefore: In Cartesian coordinates, the velocity vector is written as: The magnitude of the velocity vector in Cartesian coordinates is therefore:
Prob. in Meriam & Kraige What is the velocity and acceleration of Mr. Smiley face at t=0.5 s?