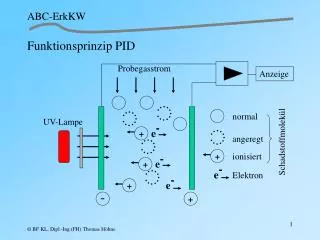
Kontroler PID
Kontroler PID. Pengendalian Sistem. Pendahuluan. Urutan cerita : Pemodelan sistem Analisa sistem Pengendalian sistem Contoh : motor DC Pemodelan mendapatkan transfer function dan blok sistem motor DC

Kontroler PID
E N D
Presentation Transcript
Kontroler PID Pengendalian Sistem
Pendahuluan • Urutan cerita : • Pemodelan sistem • Analisa sistem • Pengendalian sistem • Contoh : motor DC • Pemodelan mendapatkan transfer function dan blok sistem motor DC • Analisa memberikan inputan sinyal uji pada motor, menganalisa respon yang dihasilkan • Pengendalian mengendalikan motor agar memberikan hasil yang sesuai
Pendahuluan • Dari analisa respon sistem yang telah kita lakukan, bagaimana respon sistem (c(t)) yang kita inginkan? • Sesuai dengan input/r(t) (misal : unit step) • Jika tidak sesuai? • Salah satu caranya dengan menambahkan kontroler • Fungsi kontroler : • Mengendalikan sistem dengan memanipulasi sinyal error, sehingga respon sistem (output) sama dengan yang kita inginkan (input)
Error detector (comparator) Energy or fuel Controller Output Signal Error Signal Set Point Controller Actuator + - Manipulated variable Feedback Signal Disturbances Manufacturing Process Measured variable Measurement Devices Controlled variable Kontroler dalam Diagram Blok r(t) e(t) u(t) c(t)
Definisi kontroler • Controller • “Otak” dari sistem. • Ia menerima error / e(t) sebagai input • Lalu menghasilkan sinyal kontrol / u(t) • U(t) menyebabkan controlled variable / c(t) menjadi sama dengan set point / r(t)
Unit step 1 t Respon Sistem • Analisa respon sistem : • Kestabilan • Respon transient (karakteristik sistem) • Error steady state • Respon yang diinginkan (set point), misal unit step. Spesifikasi : • Stabil • Karakteristik respon transient : • Mp : 0 % (sekecil mungkin) • Tr, tp, ts : 0 (sekecil mungkin) • Error steady state : 0 (tidak ada error steady state
E(s) U(s) KP + - Kontroler Proporsional (P) • Persamaan matematis : u(t) = KP . e(t) dimana KP : konstanta proporsional dalam Laplace U(s)/E(s) = KP Diagram Blok • Dikenal juga sebagai : gain/penguatan
Kontroler Proporsional (P) • Pengaruh pada sistem : • Menambah atau mengurangi kestabilan • Dapat memperbaiki respon transien khususnya : rise time, settling time • Mengurangi (bukan menghilangkan) Error steady state • Catatan : untuk menghilangkan Ess, dibutuhkan KP besar, yang akan membuat sistem lebih tidak stabil • Kontroler Proporsional memberi pengaruh langsung (sebanding) pada error • Semakin besar error, semakin besar sinyal kendali yang dihasilkan kontroler • Grafik (di Ogata) + - + +
Aplikasi kontroler Proporsional 1 • Dari K. Ogata halaman 311, plant stabil jika : 14/9 > K > 0 K = 1.6 , tidak stabil K = 1.2 , stabil
Aplikasi kontroler Proporsional 2 • Contoh 2 Dengan kontroler P, respon cepat Tanpa Kontroler, respon lambat
E(s) U(s) Ki / s + - Kontroler Integral (I) • Persamaan matematis : dimana Ki : konstanta integral dalam Laplace Diagram Blok
Kontroler Integral (I) • Pengaruh pada sistem : • Menghilangkan Error Steady State • Respon lebih lambat (dibanding P) • Dapat menimbulkan ketidakstabilan (karena menambah orde sistem) • Perubahan sinyal kontrol sebanding dengan perubahan error • Semakin besar error, semakin cepat sinyal kontrol bertambah/berubah • Grafik (lihat Ogata) + - -
Aplikasi kontroler Integral Respon sistem tanpa kontroler
Aplikasi kontroler Integral Dengan kontroler P, KP = 2 Dengan kontroler PI Kp = 2 , Ki = 1 Dengan kontroler I, Ki = 1
Aplikasi kontroler Integral • Perhitungan dari contoh tersebut : • Jika transfer function kontroler I = • Jika transfer function plant = • Maka transfer function open loop = • Transfer function error = • TF Error steady state = • Terbukti bahwa penggunaan kontroler I menghilangkan error steady state!
Kontroler Derivatif (D) • Pengaruh pada sistem : • Memberikan efek redaman pada sistem yang berosilasi • sehingga bisa memperbesar pemberian nilai Kp • Memperbaiki respon transien, karena memberikan aksi saat ada perubahan error • D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi • Sehingga D tidak boleh digunakan sendiri • Besarnya sinyal kontrol sebanding dengan perubahan error (e) • Semakin cepat error berubah, semakin besar aksi kontrol yang ditimbulkan • Grafik (lihat Ogata) + + -
Aplikasi kontroler Derivatif Dengan kontroler P saja, respon berosilasi Dengan kontroler PD, Kp=1, Kd = 3
Aplikasi kontroler Derivatif • Perhitungan dari contoh tersebut : Dengan kontroler PD Kp = 1, Kd=1 Dengan kontroler P Kp = 1 TF open loop TF close loop Persamaan karakteristik Akar persamaannya real negatif, respon saat tak hingga = 0 Akar persamaannya imajiner, responnya berosilasi terus menerus
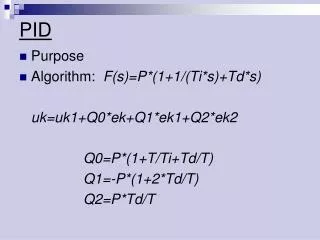
Kontroler PID • Kontroler PID Seri • Kombinasi beberapa jenis kontroler diperbolehkan • PI, PD, PID • Keuntungan kontroler PID: • Menggabungkan kelebihan kontroler P, I, dan D • P : memperbaiki respon transien • I : menghilangkan error steady state • D : memberikan efek redaman • Kontroler PID Paralel
Tuning kontroler PID • Permasalahan terbesar dalam desain kontroler PID • Tuning : menentukan nilai Ki, Kp, dan Kd • Metode – metode tuning dilakukan berdasar • Model matematika plant/sistem • Jika model tidak diketahui, dilakukan eksperimen terhadap sistem • Cara tuning kontroler PID yang paling populer : • Ziegler-Nichols metode 1 dan 2 • Metode tuning Ziegler-Nichols dilakukan dengan eksperimen (asumsi model belum diketahui) • Metode ini bertujuan untuk pencapaian maximum overshoot (MO) : 25 % terhadap masukan step
Metode tuning Ziegler-Nichols 1 • Dilakukan berdasar eksperimen, dengan memberikan input step pada sistem, dan mengamati hasilnya • Sistem harus mempunyai step response (respons terhadap step) berbentuk kurva S • Sistem tidak mempunyai integrator (1/s) • Sistem tidak mempunyai pasangan pole kompleks dominan (misal : j dan –j, 2j dan -2j) • Muncul dari persamaan karakteristik s2+1, s2+4 • Respon sistem berosilasi
Metode tuning Ziegler-Nichols 1 • Prosedur praktis • Berikan input step pada sistem • Dapatkan kurva respons berbentuk S • Tentukan nilai L dan T • Masukkan ke tabel berikut untuk mendapatkan nilai Kp, Ti, dan Td
Metode tuning Ziegler-Nichols 2 • Metode ini berguna untuk sistem yang mungkin mempunyai step response berosilasi terus menerus dengan teratur • Sistem dengan integrator (1/s) • Metode dilakukan dengan eksperimen • Dengan meberikan kontroler P pada suatu sistem close loop dengan plant terpasang • Gambar … • Lalu nilai Kp ditambahkan sampai sistem berosilasi terus menerus dengan teratur • Nilai Kp saat itu disebut penguatan kritis (Kcr) • Periode saat itu disebut periode kritis (Pcr)
Metode tuning Ziegler-Nichols 2 • Prosedur praktis • Buat suatu sistem loop tertutup dengan kontroler P dan plant di dalamnya • Tambahkan nilai Kp sampai sistem berosilasi berkesinambungan • Dapatkan responnya, tentukan nilai Kcr dan Pcr • Tentukan nilai Kp, Ti, dan Td berdasar tabel berikut