Static Structural Analysis
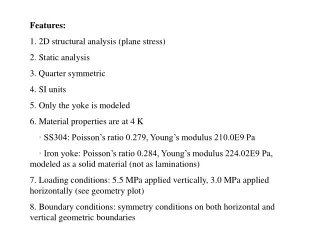
Appendix Four. Static Structural Analysis. Basics of Linear Static Analysis. A linear static structural analysis is performed to obtain the response of a structure under applied static loads

Static Structural Analysis
E N D
Presentation Transcript
Appendix Four Static Structural Analysis
Basics of Linear Static Analysis • A linear static structural analysis is performed to obtain the response of a structure under applied static loads • Displacements, reaction forces, stresses, and strains are usually items of interest that the user wants to review • The general equation of motion is as follows:where [M] is the mass matrix, [C] is the damping matrix, [K] is the stiffness matrix, {x} is displacements, and {F} is force • Because this is a static analysis, all time-dependent terms are removed, leaving the following subset: March 29, 2005 Inventory #002215 A4-2
… Elements Used • In Simulation, the following elements are used: • Solid bodies are meshed with 10-node tetrahedral or 20-node hexahedral elements • SOLID187 and SOLID186 • Surface bodies are meshed with 4-node quad shell elements • SHELL181 using real constants • Section definition (and offsets) are not used • Line bodies are meshed with 2-node beam elements • BEAM188 (with 3rd orientation node) • Section definition and offsets are supported March 29, 2005 Inventory #002215 A4-3
… Point Mass (ANSYS Details) • Internally, the Point Mass is modeled as a concentrated mass connected to surfaces with RBE3 constraints • A translational-only MASS21 (KEYOPT(3)=2) has given mass • RBE3-type of surface constraint is enabled with CONTA174, which are generated on associated ‘surfaces’ • KEYOPT(2)=2 for MPC algorithm • KEYOPT(4)=1 for nodal detection (contact) • KEYOPT(12)=5 for bonded contact • A pilot node TARGE170 is generated at the same node as the MASS21. • KEYOPT(2)=1 for user-supplied constraints • KEYOPT(4)=111111 for all DOF active • Note that RBE3 has 6 DOF but MASS21 only has 3 DOF and no rotary inertia. Also, since RBE3-type of surface constraint used (rather than CERIG-type of surface constraint), there is no stiffness between point mass and rest of structure. March 29, 2005 Inventory #002215 A4-4
… Assemblies – Solid Body Contact • Internally, the solid face contact regions are modeled in ANSYS as CONTA174 and TARGE170 elements • By default, pure penalty method is used with relative contact stiffness of 10 with symmetric contact pairs being generated • For bonded and no separation contact, any geometric penetration or gap is ignored if within the pinball region. • For frictionless and rough contact, considering “actual geometry” makes any initial gap or penetration ramped whereas “adjust to touch” closes gap with auto CNOF • NEQIT is set to 1 for if only bonded or no separation contact exist; it is set higher otherwise (20-40, depending on model). March 29, 2005 Inventory #002215 A4-5
Example of Simulation-generated edge-to-edge contact, which results in CONTA175 on one edge and TARGE170 on the other. … Assemblies – Surface Body Contact • Internally, any contact including an edge (solid body edge or surface edge) results in asymmetric contact with CONTA175 for the edge and TARGE170 for the edge/face • Contact involving solid edges default to pure penalty method • Contact involving surface edges use MPC formulation. Instead of “target normal,” if search direction is “pinball region,” KEYOPT(5)=4 set on companion TARGE170 element. • For bonded contact (default), both use KEYOPT(12)=5 and KEYOPT(9)=1. • For surface faces in contact with other faces, standard surface-to-surface contact is used, namely CONTA174 and TARGE170 March 29, 2005 Inventory #002215 A4-6
… Assemblies – Spot Weld • Internally, spot welds are defined as a set of BEAM188 elements. The spot weld is defined with one beam element, and the top and bottom of the spot weld is connected to the shell or solid elements with a ‘spider web’ of multiple beams. • The BEAM188 elements usesame material properties asunderlying materials butwith an appropriate circularcross-section with radius=5*thickness of underlyingshells • Figure on right shows spot-welds between two sets ofshell elements, which aremade translucent for clarity. March 29, 2005 Inventory #002215 A4-7
… Inertial Loads in ANSYS • Inertial loads are modeled in ANSYS as follows: • Acceleration and Standard Earth Gravity are represented via ACEL command • Rotational velocity is defined via CGLOC (defines origin) and CGOMGA (defines rotational velocity about CGLOC) March 29, 2005 Inventory #002215 A4-8
… Structural Loads in ANSYS • Structural loads are modeled in ANSYS as follows: • Pressures are applied directly on surfaces via SF,,PRES • Forces on vertices and edges are applied as nodal loads via F,,FX/FY/FZ • Forces on surfaces are applied as pressures on face 5 of surface effect elements SURF154 with KEYOPT(11)=2 • KEYOPT(11)=2 to use full area, including tangential component • Bearing loads are applied as pressures on face 5 of surface effect elements SURF154. Two sets are created for axial and radial components of bearing load: • Axial component uses KEYOPT(11)=2 for pressure on full area • Radial component uses KEYOPT(11)=0 for pressure (which is applied on compressive part of cylinder only) on projected area w/ tangential component • Moments on vertices or edges of shells are applied as nodal loads via F,,MX/MY/MZ March 29, 2005 Inventory #002215 A4-9
… Structural Loads in ANSYS • Moment load on surface is defined by surface constraint • Surface constraint is RBE3-type of distributed loading • Pilot node at surface CG defined by TARGE170 with KEYOPT(2)=1 and KEYOPT(4)=xxx000 • Surface is defined by CONTA174 with KEYOPT(2)=2, KEYOPT(4)=1, KEYOPT(12)=5 • Moment applied as nodal load on pilot node • Remote force load is defined by surface constraint • Surface constraint is RBE3-type of distributed force • Pilot node at force origin defined by TARGE170 with KEYOPT(2)=1 and KEYOPT(4)=000xxx • Surface is defined by CONTA174 or CONTA175 with KEYOPT(2)=2, KEYOPT(4)=1, KEYOPT(12)=5 • Force applied as nodal load on pilot node March 29, 2005 Inventory #002215 A4-10
… Structural Supports in ANSYS • The following are applied internally in ANSYS: • Fixed support constraints result in D,,ALL for given entity • Given displacement is D,,UX/UY/UZ for specified direction (if CS is supplied, nodes are rotated in that local CS) • Frictionless surface involves nodal rotation such that UX is in normal direction, and D,,UX is applied • Cylindrical constraint rotates nodal coordinates in cylindrical CS and constrains appropriate direction with D,,UX/UY/UZ • Simply supported constraints apply D on UX, UY, and UZ on shells or beams • Fixed rotation constraints apply D on ROTX, ROTY, and ROTZ on shells or beams • For compression-only supports, the surface mesh is copied to form a rigid target surface (TARGE170) on top of the original surface (CONTA174). Standard contact behavior is used to model this support, and that is why it is a nonlinear solution. March 29, 2005 Inventory #002215 A4-11
… Thermal Loading in ANSYS • In ANSYS, for any thermal loads present in the model: • ANSYS will always solve a thermal solution first • Even if a uniform temperature field is applied, a thermal solution will be performed. This is why temperature body loads in a structural analysis is not possible with anANSYS Structural license. • Reference temperature is defined with TREF (not MP,REFT) • TREF and TUNIF commands are set to the same value, as specified under “Reference Temp” of the Environment branch Details view • Coefficient of thermal expansion per material is supplied with MP,ALPX (not MP,CTEX or MP,THSX) • Temperature loading is input via BF commands after thermal solution March 29, 2005 Inventory #002215 A4-12
… Solution Options in ANSYS • The solver selection for direct vs. iterative: • The solvers used are either the direct sparse solver (EQSLV,SPARSE) or the PCG solver (EQSLV,PCG) • A simplified discussion between the two solvers: • If given the linear static case of [K]{x} = {F}, Direct solvers factorize [K] to solve for [K]-1. Then, {x} = [K]-1{F}. • This factorization is computationally expensive but is done once. • Iterative solvers use a preconditioner [Q] to solve the equation [Q][K]{x} = [Q]{F}. Assume that [Q] = [K]-1. In this trivial case, [I]{x} = [K]-1{F}. However, the preconditioner is not usually [K]-1. The closer [Q] is to [K]-1, the better the preconditioning is, and this process is repeated - hence the name, iterative solver. • For iterative solvers, matrix multiplication (not factorization) is performed. This is much faster than matrix inversion if done entirely in RAM, so, as long as the number of iterations is not very high (which happens for well-conditioned matrices), iterative solvers can be more efficient than sparse solvers. • The main difference between the iterative solvers in ANSYS — PCG, JCG, ICCG — is the type of pre-conditioner used. March 29, 2005 Inventory #002215 A4-13
… Solution Options in ANSYS • Weak spring option: • If used, weak springs are added to the mesh. These are modeled with COMBIN14 with small stiffness and added to the extreme dimensions of the part. • Solver working directory: • The ANSYS input file is written as “ds.dat” in the solver directory. The output file is “solve.out” and can be viewed in the “Solution Information” branch of the “Solution” branch. • ANSYS is executed in batch mode (-b) as a separate process. During solution, the results file .rst is written. The results are also read in and XML results files are generated in batch mode. The XML files are then read into Simulation. • All associated ANSYS files have default jobname of “file” and are deleted after solution, unless changed in “Tools > Options … > Simulation: Solution > Save Ansys Files”. March 29, 2005 Inventory #002215 A4-14
… Solution Options in ANSYS • Various defaults in ANSYS are turned off when solving in Simulation: • Solution control (SOLCON,OFF) is turned off • Multiframe restart is turned off (RESCON,,NONE) • ANSYS shape checking is turned off (SHPP,OFF) • Number of equilibrium iterations (NEQIT) is set to 1 if contact is not present or if all contact is bonded or no separation. • Otherwise, it is automatically determined, such as NEQIT,20 (frictionless contact) or NEQIT,40 (rough contact). NSUBST,1,10,1 is also set in these cases. • Only requested results is output with OUTRES, not everything by default • Results are later written to XML files in /POST1, which are then read back into Simulation. Hence, Simulation does not directly read the results from the .rst file March 29, 2005 Inventory #002215 A4-15
… Stresses and Strains • Safety Factors can be used to evaluate designs: • Because stress is a tensor, it is hard to evaluatethe response of the system by looking solely atstress components • The “Stress Tool” allows the user tohave Simulation calculate scalar results related to factors of safety • In the next slides, stress results willbe discussed, along with differentcriteria of evaluating material response,as available from the Stress Tool. • The “Stress Tool” branch controlswhat theory will be used and whattype of stress limit will be used. March 29, 2005 Inventory #002215 A4-16
… Principal Stresses • Principal Stresses and Strains: • From basic mechanics review, the stress tensor can be rotated such that only normal stresses appear. These are the three principal stressess1 < s2 < s3. • Principal values of stress and strain results can be requested. The three principal values also have direction associated with them, and a “Vector Principal” output can be selected. • Principal values can be exported to Excel with Euler angles • In the example shown on the right, onecan easily see the three principal stresses (white=max, blue=min). Fromthis, one can see that the part is under-going bending with one side in tensionand the other in compression. March 29, 2005 Inventory #002215 A4-17
s2 st s1 st … Principal Stresses • Maximum Tensile Stress Theory: • The maximum tensile stress theory can be used for the “Stress Tool”. It utilizes the maximum principal stress and is generally suitable for brittle materials. • The criterion can be thought of as the following:where st is the ultimate (or yield) tensile strength • If plotted in two-dimensional principal stress space, the failure surface results in a square as shown below. A stress state lying inside the square is assumed to be fine but any stress state lying on the edges of the square will fail. • The max tensile stress criterion, as itsname implies, only considers the tensilebehavior. For many brittle materials, thecompressive strength is much greater, so this assumption may be valid. March 29, 2005 Inventory #002215 A4-18
s2 st -sc s1 st -sc … Principal Stresses • Mohr-Coulomb Theory: • The Mohr-Coulomb theory can be used for the “Stress Tool”. It utilizes the maximum and minimum principal stresses and is suitable for brittle materials. • The criterion is as follows:where st and sc are the ultimate (or yield) tensile and compressive strengths. • The failure surface is plotted in two-dimensional principal stress space below. Unlike the maximum tensile stress theory, the Mohr-Coulomb theory considers the effects of the compressive strength. March 29, 2005 Inventory #002215 A4-19
… Equivalent Stress • Equivalent Stress: • The von Mises or equivalent stressse is defined as: • This criterion is commonly used for ductile metals. • When uniaxial tensile tests of specimens are performed to determine the yield strength and stress-strain relationships, the engineer needs a way to relate the uniaxial data to the stress state (tensor). Hence, the equivalent stress is a commonly used scalar invariant for this purpose. March 29, 2005 Inventory #002215 A4-20
s2 sy -sy s1 sy -sy … Equivalent Stress • Maximum Equivalent Stress Theory: • The Maximum Equivalent Stress Theory can be used for the “Stress Tool”. It compares the equivalent stress with the yield (or ultimate) strength and is suitable for ductile materials. • The criterion is as follows:where sy is the tensile yield (or ultimate) strength. • The failure surface is plotted in two-dimensional principal stress space below. • A stress state can be separated into hydrostatic and distortional terms. The hydrostatic term contributes to volume change but the distortional term is associated with yielding. Hence, the maximum equivalent stress criterion is also known as the distortion energy criterion. March 29, 2005 Inventory #002215 A4-21
… Maximum Shear Stress • Maximum Shear Stress: • The maximum shear stresstmax is defined aswhich results in the largest principal shear stress • This value can be compared to the yield strength to predict yielding for ductile materials • Stress Intensity: • The stress intensity is twice the value of the maximum shear stress. • The stress intensity provides the value of the largest difference between principal stresses March 29, 2005 Inventory #002215 A4-22
s2 sy -sy sy -sy … Maximum Shear Stress • Maximum Shear Stress Theory: • The Maximum Shear Stress Theory or the Tresca criterion can be used for the “Stress Tool”. It is suitable for ductile materials. • The criterion is as follows:where sy is the tensile yield (or ultimate) strengthand f is a factor (default=0.5) • The failure surface is plotted in two-dimensional principal stress space below with the von Mises criterion superimposed on in with a thin line. The two criteria arequite similar, although the Tresca criterionis slightly more conservative (maximumdifference between the two does notexceed 15%). s1 March 29, 2005 Inventory #002215 A4-23
… Results (ANSYS Details) • Postprocessing calculations are performed in /POST1 after the solution as part of the ANSYS input file • All contour result plots in Simulation are the same as nodal (averaged) solution with Full Graphics • Viewing Simulation contour plots would be similar to using PLNSOL with /GRAPH,FULL commands in ANSYS • No plotting is actually done in input file – this is to give an idea of equivalent plotting commands in ANSYS • Reaction forces for supports as well as nodal result data is sent to Simulation via XML files • XMLOPT and /XML commands are used • Contact (reaction) force calculations are performed by selecting contact surfaces and performing FSUM about centroid. This is repeated for target surfaces. March 29, 2005 Inventory #002215 A4-24