ME 442 Senior Project
220 likes | 271 Vues
Developed by the Class of 2008-2009, this hovercraft project aims to locate landmines in 3rd world areas using ground-penetrating radar technology. The craft is capable of navigating various terrains with minimal surface pressure.

ME 442 Senior Project
E N D
Presentation Transcript
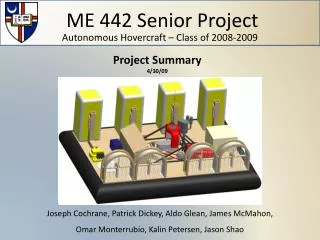
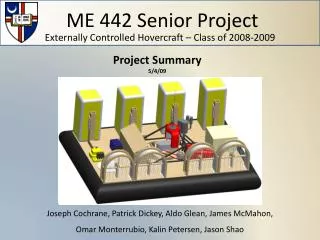
ME 442 Senior Project Externally Controlled Hovercraft – Class of 2008-2009 Project Summary 5/4/09 Joseph Cochrane, Patrick Dickey, Aldo Glean, James McMahon, Omar Monterrubio, Kalin Petersen, Jason Shao
Post-Conflict Mine Fields • Unexploded landmines from previous military conflicts are still a prevalent issue in civilian 3rd world areas • Estimated 1 million unexploded landmines left over from a skirmish between Israel and Lebanon in 2006
Landmines • Anti-personnel landmines are generally small and designed to maim, not kill • Most anti-personnel landmines are detonated when about 5psi of contact pressure is applied to a triggering mechanism on the device • Can be triggered via a person stepping on device, driving over device, increased pressure or vibration
Our Concept • Want to develop a means for civilian land-mine location that is inexpensive and easily reparable • Our intention is to design the platform for carrying detection technology, not develop the technology itself
Why a Hovercraft? • Vehicle that utilizes an engine to drive a large fan inside a structure, which creates an air cushion within a fabric skirt • Provides lift force to counteract the weight of the craft while applying very little pressure to the surface beneath, ~0.1psi • Capable of traveling over solid, marshy and wet terrains, making it adaptable to the various rural environments
Critical Design Features Ground Penetrating Radar (GPR) Component layout and balance analysis Lift engine mount Pressure testing Thruster housing mesh testing Controls
Ground Penetrating Radar • Penetradar GPR system outfitted with IRIS processing software provided by U.S. Army Night Vision Directorate • Test designed to observe its detection capabilities
Component Layout and Balance Analysis • Components should be arranged to minimize air flow impedance to thrusters and maximize balance of craft • Used modeling software arrange layout and assign component weights and calculate center of mass (side view)
Component Layout and Balance Analysis • Thrusters arranged to maximize forward and backward response • Turning capability increased by placing center thrusters closer to outer units • ~1ft of free space arranged between thruster units and other equipment, so air flow would not be obstructed Center of Mass (top view)
Lift Engine Mount • Design objectives: • Maximize space efficiency • Support and restrain lift engine while in operation • Initial testing revealed significant vibration of engine, indicating deformation of the mount and potential fatigue failure
Lift Engine Mount • Additional element was added to bolster the engine’s supporting members and to reduce stress and resulting deformation
Pressure Testing • Verification of lift and air flow calculations • Used differential pressure transducer to measure static pressure inside the hull • Average pressure produced was 0.16psi • Predicted value was 0.19psi • ~16% difference
Thruster Testing • Pendulum apparatus allowed testing of various thrust system parameters: • Motors • Propellers • Housing mesh • configurations
Thruster Housing Mesh Tests • Housings would restrict air flow and thrust force • Modified mesh improved results • Both meshes required for safety parameters • Maximum force of ~15.67lbf
Controls • Requirements: • Control from external location • Move with 2DOF • Easily operable interface • Constraints: • Cost • Must use computer already on craft • 4 Simultaneous motors • Signal must be a PWM square wave
Controls Laptop via remote desktop Microcontroller PC w/ GUI Electric Motors
Controls Direction of airflow
Controls Direction of airflow
Controls Direction of airflow
Controls Direction of airflow
Conclusions • We produced a hovering craft that is capable of: • Carrying required lift and power components in addition to navigation and detection equipment • (~700 lbs) • Supplying power to the propulsion and electronics systems
Conclusions • Tests were completed on each subsystem • Controls, Ground Penetrating Radar and navigation systems need to be refined further • A basic integrated test has been conducted with all of the various systems