OBJECTIVES
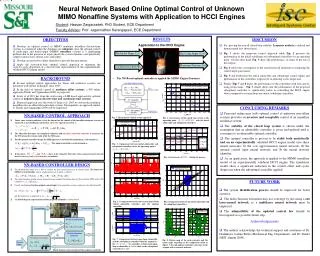
Stochastic Optimal Control of Unknown Linear Networked Control System in the Presence of Random Delays and Packet Losses. Faculty Advisor : Dr. Jagannathan Sarangapani, ECE Department. Student : Hao Xu, ECE Department. Simulation Results

OBJECTIVES
E N D
Presentation Transcript
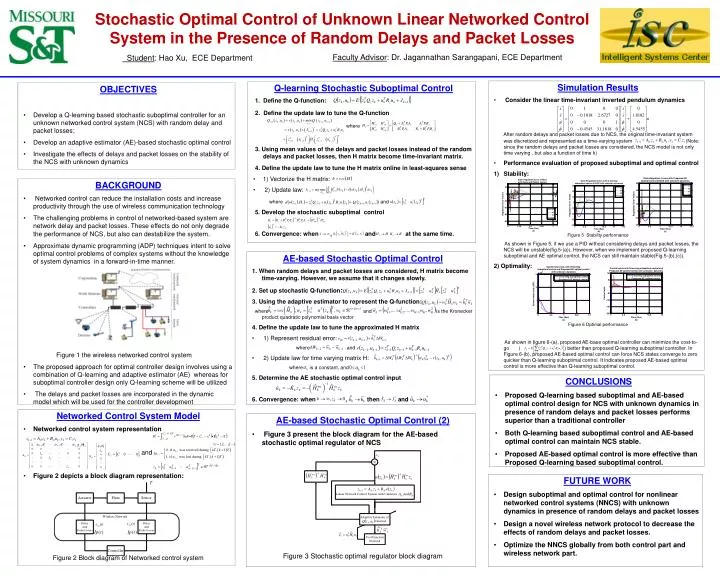
Stochastic Optimal Control of Unknown Linear Networked Control System in the Presence of Random Delays and Packet Losses Faculty Advisor: Dr. Jagannathan Sarangapani, ECE Department Student: Hao Xu, ECE Department • Simulation Results • Consider the linear time-invariant inverted pendulum dynamics • After random delays and packet losses due to NCS, the original time-invariant system was discretized and represented as a time-varying system(Note: since the random delays and packet losses are considered, the NCS model is not only time varying , but also a function of time k) • Performance evaluation of proposed suboptimal and optimal control • Stability: • Figure 5 Stability performance • As shown in Figure 5, if we use a PID without considering delays and packet losses, the NCS will be unstable(fig.5-(a)). However, when we implement proposed Q-learning suboptimal and AE optimal control, the NCS can still maintain stable(Fig.5-(b),(c)). • 2) Optimality: • Figure 6 Optimal performance • As shown in figure 6-(a), proposed AE-base optimal controller can minimize the cost-to-go ( ) better than proposed Q-learning suboptimal controller. In Figure 6-(b), proposed AE-based optimal control can force NCS states converge to zero quicker than Q-learning suboptimal control. It indicates proposed AE-based optimal control is more effective than Q-learning suboptimal control. • Q-learning Stochastic Suboptimal Control • 1. Define the Q-function: • 2. Define the update law to tune the Q-function • where • 3. Using mean values of the delays and packet losses instead of the random delays and packet losses, then H matrix become time-invariant matrix. • 4. Define the update law to tune the H matrix online in least-squares sense • 1) Vectorize the H matrix: • 2) Update law: • where and • 5. Develop the stochastic suboptimal control • 6. Convergence: when , and at the same time. • OBJECTIVES • Develop a Q-learning based stochastic suboptimal controller for an unknown networked control system (NCS) with random delay and packet losses; • Develop an adaptive estimator (AE)-based stochastic optimal control • Investigate the effects of delays and packet losses on the stability of the NCS with unknown dynamics • BACKGROUND • Networked control can reduce the installation costs and increase productivity through the use of wireless communication technology • The challenging problems in control of networked-based system are network delay and packet losses. These effects do not only degrade the performance of NCS, but also can destabilize the system. • Approximate dynamic programming (ADP) techniques intent to solve optimal control problems of complex systems without the knowledge of system dynamics in a forward-in-time manner. • Figure 1 the wireless networked control system • The proposed approach for optimal controller design involves using a combination of Q-learning and adaptive estimator (AE) whereas for suboptimal controller design only Q-learning scheme will be utilized • The delays and packet losses are incorporated in the dynamic model which will be used for the controller development • AE-based Stochastic Optimal Control • 1. When random delays and packet losses are considered, H matrix become time-varying. However, we assume that it changes slowly. • 2. Set up stochastic Q-function: • 3. Using the adaptive estimator to represent the Q-function: • where and is the Kronecker product quadratic polynomial basis vector • 4. Define the update law to tune the approximated H matrix • 1) Represent residual error: • where and • 2) Update law for time varying matrix H: • where is a constant, and • 5. Determine the AE stochastic optimal control input • 6. Convergence: when , then and • CONCLUSIONS • Proposed Q-learning based suboptimal and AE-based optimal control design for NCS with unknown dynamics in presence of random delays and packet losses performs superior than a traditional controller • Both Q-learning based suboptimal control and AE-based optimal control can maintain NCS stable. • Proposed AE-based optimal control is more effective than Proposed Q-learning based suboptimal control. • Networked Control System Model • Networked control system representation • and • Figure 2 depicts a block diagram representation: • Figure 2 Block diagram of Networked control system • AE-based Stochastic Optimal Control (2) • Figure 3 present the block diagram for the AE-based stochastic optimal regulator of NCS • Figure 3 Stochastic optimal regulator block diagram • FUTURE WORK • Design suboptimal and optimal control for nonlinear networked control systems (NNCS) with unknown dynamics in presence of random delays and packet losses • Design a novel wireless network protocol to decrease the effects of random delays and packet losses. • Optimize the NNCS globally from both control part and wireless network part.