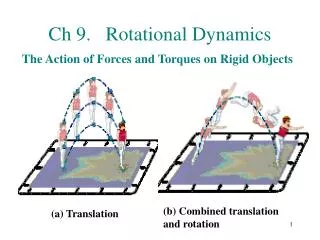
Chapter 9: Rotational Motion
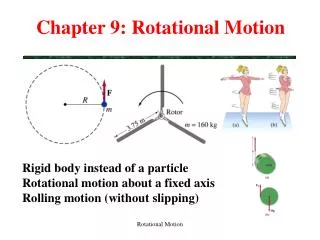
Chapter 9: Rotational Motion. Rigid body instead of a particle Rotational motion about a fixed axis Rolling motion (without slipping). Angular Quantities. Kinematical variables to describe the rotational motion: Angular position, velocity and acceleration. “ R ” from the Axis (O).

Chapter 9: Rotational Motion
E N D
Presentation Transcript
Chapter 9: Rotational Motion Rigid body instead of a particle Rotational motion about a fixed axis Rolling motion (without slipping) Rotational Motion
Angular Quantities Kinematical variables to describe the rotational motion: Angular position, velocity and acceleration Rotational Motion
“R” from the Axis (O) Solid Disk Solid Cylinder Rotational Motion
Linear and Angular Quantities atan arad Rotational Motion
Kinematical Equations Rotational Motion
Chapter 10: Rotational Motion (II) Rigid body instead of a particle Rotational motion about a fixed axis Rotational dynamics Rolling motion (without slipping) Rotational Motion
Angular Quantities: Vector Kinematical variables to describe the rotational motion: Angular position, velocity and acceleration Vector natures z R.-H. Rule y x Rotational Motion
Rotational Dynamics: t (a) ax la (b) a lb m I Rotational Motion
Note: t = F R sinq Rotational Motion
Note: sign of t Rotational Motion
Rotational Dynamics: I m2 m1 m3 Rotational Motion
Rotational Dynamics: I d Rotational Motion
Parallel-axis Theorem d Rotational Motion
Parallel-axis Theorem Rotational Motion
Example 1 Calculate the torque on the 2.00-m long beam due to a 50.0 N force (top) about (a) point C (= c.m.) (b) point P Calculate the torque on the 2.00-m long beam due to a 60.0 N force about (a) point C (= c.m.) (b) point P Calculate the torque on the 2.00-m long beam due to a 50.0 N force (bottom) about (a) point C (= c.m.) (b) point P Rotational Motion
Example 1 (cont’d) Calculate the net torque on the 2.00-m long beam about (a) point C (= c.m.) (b) point P Rotational Motion