Kinematics of Swimming Modes in Antarctic Krill: Analysis and Behavioral Insights
This study explores the diverse swimming modes of Antarctic krill, highlighting unique pleopod kinematics essential for locomotion. Through high-speed filming and kinematic analysis, the research identifies distinct behaviors like forward swimming, hovering, and upside-down swimming. Each mode exhibits specific energetic profiles and adaptability to schooling conditions, suggesting potential energy savings. By quantifying parameters like stroke amplitude and beat frequency, the work aims to understand the hydrodynamic efficiencies of krill, contributing to our knowledge of marine biology and ecosystem dynamics.

Kinematics of Swimming Modes in Antarctic Krill: Analysis and Behavioral Insights
E N D
Presentation Transcript
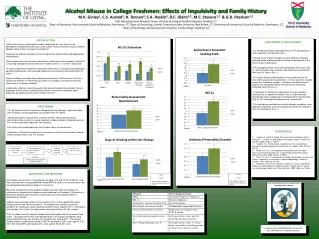
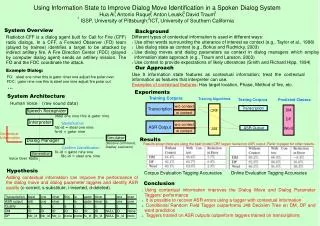
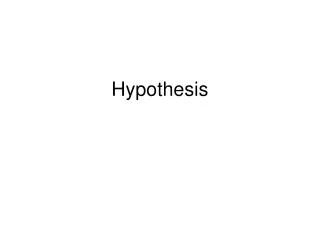
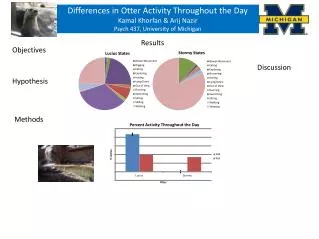
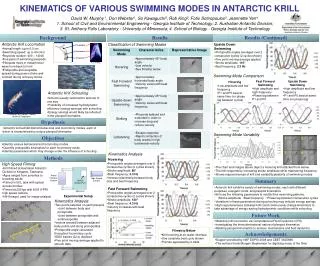
KINEMATICS OF VARIOUS SWIMMING MODES IN ANTARCTIC KRILL David W. Murphy 1, Don Webster1, So Kawaguchi2, Rob King2, Fotis Sotiropoulos3, Jeannette Yen4 1. School of Civil and Environmental Engineering - Georgia Institute of Technology; 2. Australian Antarctic Division; 3. St. Anthony Falls Laboratory - University of Minnesota; 4. School of Biology - Georgia Institute of Technology Background Results Results (Continued) Antarctic Krill Locomotion Water Filtration System Classification of Swimming Modes Upside Down Swimming Protopodite High Speed Camera Optical Access Port • Animal length: up to 6.5 cm • Swimming speed: up to 40 cm/s • Reynolds number: 400 – 14000 • Five pairs of swimming pleopods • Pleopods move in metachronal wave from back to front • Endopodite and exopodite spread during power stroke and contract during recovery stroke Endopodite • Protopodite angles averaged over 2 consecutive cycles (2 cycles shown) • Five point moving average applied • Stroke amplitude: 115° • Beat frequency: 3.3 Hz Exopodite Aquarium Kils (1983) Swimming Mode Comparison Fast Forward Swimming Upside Down Swimming Hovering • Low amplitude and low frequency • P1 and P5 beat at same time (no phase lag between cycles) • High amplitude and high frequency • Phase lag between P1 and P5 • High amplitude and low frequency • P1 and P5 beat at same time (no phase lag) Rudi Kuiter Antarctic Krill Schooling Hovering: Forward Swimming: • Schools usually restricted to animals of one size • Possibility of increased hydrodynamic efficiency (energy savings) with schooling • Energy savings would likely be reflected in the pleopod kinematics Photograph by George F. Mobley (National Geographic) Hypothesis • Antarctic krill exhibit distinct behavioral and locomotory modes, each of which is characterized by unique pleopod kinematics Swimming Mode Variability Objectives 1 2 • Identify various behavioral and locomotory modes • Quantify protopodite kinematics for each locomotory mode • Identify parameters which may change under the influence of schooling 3 4 Kinematics Analysis Methods Hovering • Protopodite angles averaged over 5 consecutive cycles (2 cycles shown) • Stroke amplitude: 80° • Beat frequency: 3.3 Hz • Inverse relationship between body size and beat frequency High Speed Filming • The chart and images above depict a hovering krill attacked from below. • The krill responds by increasing stroke amplitude while maintaining frequency. • Shows responsiveness of krill and variability/plasticity of swimming modes • Krill filmed at Australian Antarctic Division in Kingston, Tasmania • Ages ranged from juveniles to breeding adults • Filmed in 50 L tank with optical access window • Filmed at 250 fps with AOS X-PRI high speed camera • NIH ImageJ used for image analysis Summary • Antarctic krill exhibit a variety of swimming modes, each with different purposes, energetic costs, and pleopod kinematics • Krill use the following parameters to modify their swimming patterns: • Stroke amplitude • Variations in these parameters during schooling may indicate energy savings • High responsiveness indicates krill could continuously change kinematics to take advantage of energy-saving hydrodynamic conditions while schooling Fast Forward Swimming • Protopodite angles averaged over 2 consecutive cycles (2 cycles shown) • Stroke amplitude: 120° • Beat frequency: 4.3 Hz • Velocity increases with beat frequency Experimental Setup • Beat frequency • Phase lag between consecutive cycles Kinematics Analysis P1 • Two points selected on each pleopod • Joint between body and protopodite • Joint between protopodite and endo/exopodite • Vectors created between adjacent body points and along protopodites • Protopodite angle calculated throughout locomotory cycle • 5500 frames (22 s) digitized • Five point moving average applied to smooth data P2 P3 P4 P5 Future Work • Modeling krill locomotion via Computational Fluid Dynamics (CFD) • Investigating the three dimensional nature of pleopod kinematics • Relating pleopod kinematics to sensory mechanisms and fluid dynamics Filmstrip Below Acknowledgements • Krill hovering at air-water interface • One complete beat cycle shown • Frames separated by 0.024s • Support provided by NSF EAPSI 2008 and CBET 0625898 • The authors thank Morgan Stephenson for digitizing many of the films • Financial Θ