Root Locus Technique and Eigenvalue Curves in Control Systems Analysis
This document explores the root locus technique to analyze the behavior of eigenvalues in the s-plane as a parameter K varies. Using Example 5.1, we determine the roots of a polynomial and construct the root locus for specific values. It discusses key concepts such as breakaway points, asymptotes, and their influence on system stability. Additionally, using MATLAB functions like `rlocus` and `rlocfind`, we illustrate how to visualize the root locus and identify critical points of interest.

Root Locus Technique and Eigenvalue Curves in Control Systems Analysis
E N D
Presentation Transcript
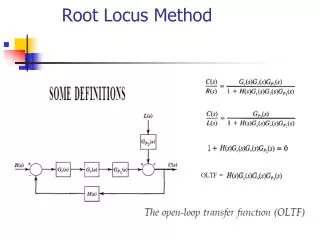
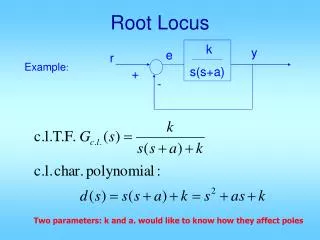
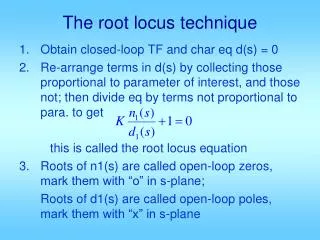
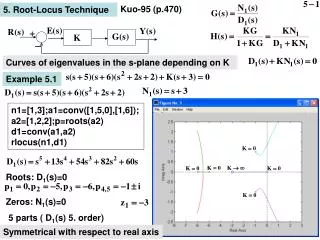
R ( s ) Kuo-95 (p.470) 5. Root-Locus Technique Curves of eigenvalues in the s-plane depending on K Example 5.1 n1=[1,3];a1=conv([1,5,0],[1,6]); a2=[1,2,2];p=roots(a2) d1=conv(a1,a2) rlocus(n1,d1) Roots: D1(s)=0 Zeros: N1(s)=0 5 parts ( D1(s) 5. order) Symmetricalwith respect to real axis
Intersect of the asymptotes: Routh tabulation (Example 3.1) k=35; a=polyadd(d1,k*n1);p=roots(a) Breakaway points: n1d=[1];d1d=[5,4*13,3*54,2*82,60]; a=polyadd(conv(n1d,d1),-conv(d1d,n1));roots(a)
ksi=0.6;wn=2;sg=-ksi*wn;w=wn*sqrt(1-ksi^2); hold on;plot([0,sg],[0,w]);hold off;rlocfind(n1,d1)