Download

1 / 22
220 likes | 305 Vues
Learn about conditional planning, execution monitoring, and situated planning to navigate dynamic and non-deterministic environments effectively. Explore strategies, challenges, and adaptations for successful plan execution and adjustment. Dive into case studies and theoretical applications to master real-world problem-solving techniques.

E N D
Planejamento Situado Jacques Robin (CIn-UFPE) Fernanda Marques Simone Correia
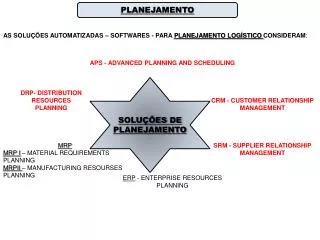
Introdução • POP e HPOP: • Funcionam quando: • Ambiente acessível, estático, determinístico • Conhecimento completo e correto • Só perceber, depois só planejar, depois agir cegamente • Em ambientes mais desafiadores: • Abordagens: • 1. Planejamento condicional • 2. Monitoriamento da execução • 3. Planejamento situado • Perceber, depois juntamente planejar, perceber e agir
Abordagens para planejamento em ambiente dinâmicos ou não-determinista • Planejamento Condicional • Execução e geração de um plano condicional. • Extensão da linguagem • Replanejamento • Monitoramento: ação x execução • Planejamento situado • Extensões e Discussões • Planejamento condicional x replanejamento • Coerção e abstração.
Planejamento condicional • Plano condicional: • representa conjunto de planos, • um para cada possível situação de execução • Ações de Efetuação x Ações de Percepção: • objetivo ação de efetuação: alterar ambiente • objetivo ação de percepção: alterar conhecimento do ambiente (ex, checar o preço de algum objeto). • Ação de percepção pode: • ter efeitos colaterais no ambiente • desencadear sub-plano com ações de efetuação
Monitoramento da execução • Começar execução com plano completo e correto dados conhecimento e suposições inicialmente disponíveis • Usar percepções durante a execução para adquirir conhecimento complementar e verificar suposições • Replanejar fim do plano para se adequar as situações não antecipadas. • Ex., o agente descobre não ter $ suficiente para comprar todos os itens.
E se as coisas não saírem como planejadas? • Monitoramento da Ação: • Verificação, com percepção, das pre-condições do próximo passo • Monitoramento da Execução: • Verificação, com percepção, das pré-condições do segmentode plano restante. • Condições de lidar com pré-condições: • não planejadas • já satisfeitas • Ex., robô dirigindo carro
Detecção das falhas do plano • 2 tipos de causas de falhas: • Não determinismo ou inacessibilidade enumerável • ex., abrir lata de tinta (normal, vazia, derrame) • pode usar C-POP-D • Não determinismo ou inacessibilidade não enumerável • ex., dirigir, planejamento econômico • requer replanejamento
Replanejamento • Escolher a melhor continuação • Verificar as precondições • Executar Q A P R Fim Início Agora
Replanejamento • Escolher a melhor continuação • Verificar as precondições • Executar Q A P R A’ P’ Fim Início Agora
Replanejamento • Escolher a melhor continuação • Verificar as precondições • Executar Q A P R A’ P’ Q’ Fim Início Agora Q = R + P ( Plano inicial ) Q’= R + P’ ( Plano Final )
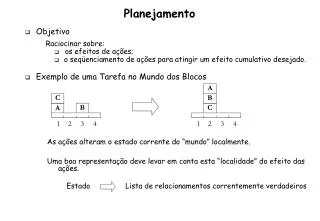
Planejamento Situado • Gera um plano inicial • Logo começa a executá-lo mesmo incompleto • Continua planejando durante a execução, intercalando: • execução de passos (de percepção e efetuação) • refinamento e ajuste do plano diante de defeitos e mudanças não antecipadas no ambiente.
Ex: Mundo dos blocos C D Op(Ação: Mover(x, y), Precond: Limpo(x)^Limpo(y)^EmCima(x, z) Efeito: EmCima(x,y)^Limpo(z)^~EmCima(x, z)^~Limpo(y) B E C F D G B E G A A F Estado Inicial Objetivo
Plano Inicial B E C F D G A Estado Inicial EmCima (C,F) Limpo (C) Limpo (D) Mover (C,D) NaMesa (A) EmCima (B,E) EmCima (C,F) EmCima (D,G) Limpo (A) Limpo (C) Limpo (D) Limpo (B) EmCima (C,D) EmCima (D,B) Início Fim EmCima (D,G) Limpo (D) Limpo (B) Mover (D,B)
Eis que de repente... D A próxima ação seria: Mover (D, B), mas as pré-condições Limpo (B) ^ EmCima (D,G) não são mais válidas B E C F G A EmCima (C,F) Limpo (C) Limpo (D) Mover (C,D) NaMesa (A) EmCima (B,E) EmCima (C,F) EmCima (D,B) Limpo (A) Limpo (C) Limpo (D) Limpo (G) EmCima (C,D) EmCima (D,B) Início Fim EmCima (D,y) Limpo (D) Limpo (B) Mover (D,B)
D B E C F G A • Extendendo um link causal EmCima (C,F) Limpo (C) Limpo (D) Mover (C,D) NaMesa (A) EmCima (B,E) EmCima (C,F) EmCima (D,B) Limpo (A) Limpo (C) Limpo (D) Limpo (G) EmCima (C,D) EmCima (D,B) Início Fim EmCima (D,Y) Limpo (D) Limpo (B) Mover (D,B)
D B E C F G A • Eleminando passos redundantes EmCima (C,F) Limpo (C) Limpo (D) Mover (C,D) NaMesa (A) EmCima (B,E) EmCima (C,F) EmCima (D,B) Limpo (A) Limpo (C) Limpo (D) Limpo (G) EmCima (C,D) EmCima (D,B) Início Fim
D C B E F G A • Um Agente Aloprado... NaMesa (A) EmCima (B,E) EmCima (C,A) EmCima (D,B) Limpo (F) Limpo (C) Limpo (D) Limpo (G) EmCima (C,D) EmCima (D,B) Início Fim
D C B E F G A • Adicinando um novo passo... EmCima (C,A) Limpo (C) Limpo (D) Mover (C,D) NaMesa (A) EmCima (B,E) EmCima (C,A) EmCima (D,B) Limpo (F) Limpo (C) Limpo (D) Limpo (G) EmCima (C,D) EmCima (D,B) Início Fim
C D B E F G A • Finalmente: • plano revisado final completo e correto • agente situado procura novo objetivo NaMesa (A) EmCima (B,E) EmCima (C,D) EmCima (D,B) Limpo (A) Limpo (C) Limpo (D) Limpo (G) EmCima (C,D) EmCima (D,B) Início Fim
Planejamento condicional x replanejamento (# passos) • Planejamento Condicional: # condições = e • Replanejamento: planos frágeis nem sempre podem ser completados • Um sistema híbrido • Conclusão: deve-se considerar probabilidades e custos dos resultados.
Outros métodos para contornar a incerteza: coerção e agregação • Coerção: • forçar o mundo a um estado conhecido. • ex., Objetivo: Color(Chair,c)^Color(Table,c) • Solução: pintar a cadeira e a mesa com mesma tinta • Objetivo de manutenção: • proibir coerção de algumas propriedades de alguns objetos • ex.,Color(Chair,c)^Color(Table,c)^Maintain(Color(Table,x)) • Agregação: • agrupar objetos de comportamento individual não determinístico • em classes de comportamento global determinístico
Abstração, arquitetura híbridas e multi-agentes Ambiente Determinístico Agente Planejador Simbólico Declarativo Grau de Abstração Ambiente Não-Determinístico Agente Reativo Simbólico Procedimental ou Sub-Simbólico