Smart Rover
Smart Rover. Aaron Westphal Ben Merkel Joe Merrill Mike Wissolik. Baseline Project Objectives. Design and develop an unmanned rover. Ability to: Receive data via central computer. Locate GPS coordinates. Locate heading via a digital compass. Micro Processors on board provide ‘smarts’.


Smart Rover
E N D
Presentation Transcript
Smart Rover Aaron Westphal Ben Merkel Joe Merrill Mike Wissolik
Baseline Project Objectives Design and develop an unmanned rover. • Ability to: • Receive data via central computer. • Locate GPS coordinates. • Locate heading via a digital compass. • Micro Processors on board provide ‘smarts’. • Tank-like Motor control and motion. • Completely scalable and upgradeable platform. • Create a simple and effective user interface.
Purpose • Incorporates a plethora of design task. • Mechanical • EE • CS • System integration • Unmanned mobile devices have become the workhorse for many industries.
Outline of Approach • Define Functionality. • Establish means and methods. • Delegate responsibilities. • Mike and Aaron – Processor functionality (Smarts) • Ben and Joe – Hardware and EE development • Construction.
Target Consumers • Open design Allows for a wide range of duties: • Military • Mining • Geological Surveying • Utility Companies • Much More • Potential to be very profitable.
Micro Processors • PIC 16F876 • Feature: • USART (single) • I2C bus interface • ISP and debugging. • A/D converter • All powered off single clean switching power supply.
Modularity • Each feature controlled by it’s own PIC. • A “Bus Master” PIC will control data flow between different PIC’s. • The actual bus will be implemented via I2C. • This allows us to: • Add any functionality provided it has it’s own PIC. • Be completely scalable and upgradeable. • Allow for after market add-ons with no change to original platform.
Block Diagram Bus Master PIC IIC Bus PC PIC RF Link PIC PIC Additional PIC’s Motor Control GPS Digital Compass Expandability Motors
Expandables • Ability to store positional and environmental data via EEPROM: • Obstruction data. • Mine location data. • Additional roaming modes: • “smart mode”: Navigate from point to point while avoiding known obstructions. • “Aquire Mode”: In case of RFCOMM loss, search for obstructions without being told to. • Sonar, radar, camera, audio.
Motor Control • Tank like design offers more versatile solution. • Speed control. (D/A) • Feedback. (A/D) • Digital to analog interface.
GPS • UART HCI to unique PIC • Provides latitude and longitude information to system • High accuracy and ability to operate in any location/environment • Thousands of updates every second allow for continuous direction calculations
Digital Compass • Digital Compass provides bearing of rover. • Controlled by same PIC which controls GPS and will relay information to motor control PIC • Interfaced over IIC bus or UART
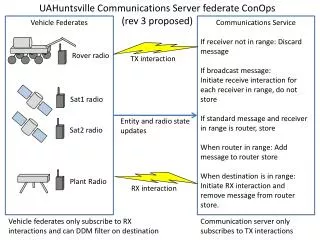
RF COMM • RS-232 emulator provides low cost and easy to implement RF link. • Self contained unit including power supply eases system integration and reduces power constraints.
Manufacturability • Manufacturability is low cost since the basic rover never changes • Once rover and peripherals are qualified, there is no need to re-qualify the rover in any configuration
Safety • This project will be safe to the end consumer • When working with power tools eye protection will be worn • No user voltages above 14 Vdc • No sharp objects exposed • All electronics can be concealed
Impact on Society • Pave the way for unmanned low-cost customizable vehicles • Put existing technologies to practical use for innovative applications • Upgradeability allows for limitless possibilities
Risks • Communication problems with many PICs on same I2C bus • Under designing the powered chassis disallowing adequate mobility • Magnetic interference on compass accuracy from permanent magnet motors • Lack of resolution on available GPS boards
Contingency • Add more functionality to single PIC to lessen need for other PICs • Use proven chassis that has been prefabricated • Alternate source of directional information