Analyze Phase
The Senior Design Team is focused on creating an effective and economical oil palm harvester. With members from Mechanical Engineering (ME) and Industrial Engineering (IE), the project aims to enhance portability, safety, and affordability through innovative design. The team is progressing from initial prototypes (Prototype 1.0) to more advanced versions (Prototype 2.0) based on testing results. Key components include a telescoping pole, cutting tool, tree grips, and a cart. The project will improve the harvesting process and address previous design limitations.


Analyze Phase
E N D
Presentation Transcript
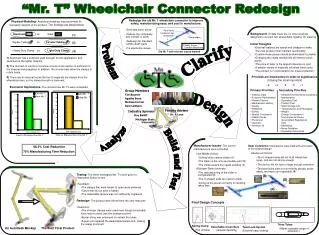
Analyze Phase Senior Design Team 25: Palm Harvester
Group Members • Brian Newman, ME • David Boswell, ECE • Bolivar Lobo, IE • Louis-Olivier Verret, IE • Gianni Alessandria, IE • Ricardo Aleman, ME • Yuze Liu, ME Brian
Advisors • Dr. Okoli(Sponsor) • Dr. Olawale (IE supervisor) • Dr. Amin (ME senior design coordinator) • Dr. Clark (ME advisor) • Dr. Frank (ECE senior design coordinator) • Dr. Moss (ECE advisor) Brian
Project Review • Previous group constructed an incomplete climbing robot • Cart with telescoping pole design was selected • Physical models were constructed • Pole saw was to move electronically • Prototype 1.0 was designed to be more basic • Prototype 2.0 will be constructed if testing proves successful Palm Harvester Goal Develop an effective, efficient, and economical oil palm harvester Brian
Major Selling Points Portable Safer More Affordable Bolivar
Major Selling Points Stable Design Bolivar
Prototype 1.0 Components A • Cutting Tool (A) • Telescoping Pole (B) • Tree Grips (C) • Cart (D) • Power/ Auxiliary System (E) R = 5ft B H ≤ 40ft C Palm Harvester Oil Palm Drawing not to scale h = 4ft D & E Louis
Cutting Tool Design • 2 DOF: Horizontal and vertical rotation • 10 foot long pole saw balanced in center • Ropes and pulleys allow for motion Louis
Cutting Tool Design Square Tubes Camera Lazy Susan Angle Brackets Louis
Telescoping Pole Design HDPE Bars 2 in Diameter Steel 3 in Diameter PVC 4 in Diameter PVC 6 in Diameter PVC Louis
Telescoping Pole Design Pivot Block • The pole can fold down • Rotate with the pivot block • The pole can translate through the hole of the pivot block Self-locking shoulder screw Alignment Block Louis
Tree Grip Design Operation Winch the rope Tension closes grip Release winch Spring opens grip Louis
Cart Design Swivel Caster Monitor Winch Rigid Caster Perforated Tube Modified cart Louis
Fabrication Brian
Delivery • Budget Spent: $1477 • Budget Remaining: $523 Brian
Cart Reinforcement • Cart material was not rigid enough to handle the loads expected Brian
Rotating Top Platform • Completely assembled Brian
Tree Grips • Assembly in progress • Still need to 3D print slider Brian
Power Configuration David
Camera & Monitor • Waterproof and durable • Easy setup • Outputs video via RCA cable • Waterproof • 12VDC 60mA (.72W) • Durable • Requires waterproofing case • 12VDC • 8W David
Pole Saw • Black and Decker 18V Max Lithium Ion Pole Pruning Saw David
Pole Saw Test • Information gathered: • Average Current • Peak Current • Average Cutting Time
Current Data David
Power Supply • 12VDC battery and charger • 7 Amp Hour (84W-hr) - 9.5 hours of use • 1.5 Amp-hours (27W-hr) • 5 seconds to cut fruit at 6 amps (108W) • Cut up to 300 fruits • (assuming 5sec/cut ) David
Pole Saw Configuration • Pole Saw will be balanced at center of mass • Pushbutton used to activate cutting tool • Wires will be used for connections David
Power Configuration David
Analysis Brian
Tree Grip Force Analysis • Analysis in ForceEffect App (iOS) • Predicts 10:1 reduction in force • Eg. 50lbs tension = 5lbs grip • Experiments indicate 20:3 reduction in force • Eg. 50lbs tension = 7lbs grip • Tension can be up to 100lbs 5lbs 5lbs 50lbs Brian
Center of Gravity Force Analysis • Analysis in ForceEffect App (iOS) • Weighted poles modeled as thin vertical links • What are the reactions? • Moments • Forces Brian
90°: With vs Without Tree Grips 3lb 6lb Brian Moment reduced 87% from 35lb-ft to 8lb-ft
89°: With vs Without Tree Grips 3lb 6lb Brian Moment reduced 91% from 85lb-ft to 8lb-ft
Wind: With vs Without Tree Grips 10lb drag 10lb drag 12lb 9lb Brian Moment reduced 97% from 400lb-ft to 11lb-ft
Effect of Tree Grips • Overall the tree grips dramatically stabilize the system
Schedule Bolivar
Future Plans • Assembly In Progress • Telescoping Poles • Tree Grips • Assembly to Being • Electrical connections • Monitor case • Camera mounting Bolivar
Future Plans • Testing • Telescoping pole • Camera/Monitor • Cutting Bolivar
Future Plans • Improve Prototype 1.0 Prototype 2.0 Bolivar