
Motion Estimation using Markov Random Fields
E N D
Presentation Transcript
Motion Estimation using Markov Random Fields Hrvoje Bogunović Image Processing Group Faculty of Electrical Engineering and Computing University of Zagreb Summer School on Image Processing, Graz 2004
Overview • Introduction • Optical flow • Markov Random Fields • OF+MRF combined • Energy minimization techniques • Results
Introduction • Input: • Sequence of images (Video) • Problem • Extract information about motion • Applications • Detection, Segmentation, Tracking, Coding
Motion – aliasing Large area flicker f 1/t φ 1/x Loss of spatial resolution
Large motions - temporal aliasing f Temporal aliasing φ Great loss of spatial resolution
Temporalanti-aliasing f φ • No more overlaping on the f axis. • filtering (anit-aliasing) is performed after sampling, hence the blurring
Motion estimation • Images are 2-D projections of the 3-D world. • Problem is represented as a labeling one. • Assign vector to pixel • Vector field field of movement • Low level vision • No interpretation
Problems • Problem is inherently ill-posed • Solution is not unique • Aperture problem • Specific to local methods
Optical flow • Main assumption: Intensity of the object does not change as it moves • Often violated • First solved by Horn & Schunk • Gradient approach • Other approaches include • Frequency based • Using corresponding features
Gradient approach • Local by nature. Aperture problem is significant. • Image understanding is not required • Very low level
Horn & Schunk • Intensity stays the same in the direction of movement. I(x,y,t) •After derivation
Horn & Schunk • Spatial gradients Ix,Iy • e.g. Sobel operator • Temporal gradient It • Image subtraction
Regularization • Tikhonov regularization for ill-posed problems • Add the smoothness term • Energy function
Problems of the H-S method • Assumption: There are no discontinuities in the image • Optical flow is over-smoothed. • Gradient method. Only the edges which are perpendicular to motion vector contribute • Image regions which are uniform do not contribute. • Difficulty with large motions (spatial filtering)
Optical flow enhancement • Optical flow can be piecewise smooth • Discontinuities can be incorporated • Solution: use the spatial context • Problem is posed as a solution of the Bayes classifier. Solution in optimization sense. Search for optimum
Bayes classifier • Main equation • Solution using MAP estimation
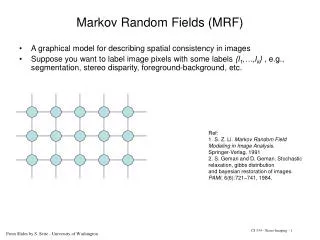
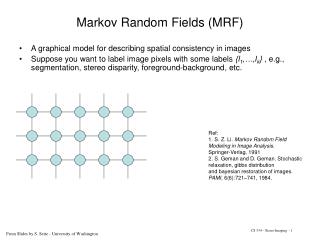
Markov Random Fields • Suitable: Problems posed as a visual labeling problemn with contextual constraints • Useful to encode a priori knowledge • required for bayes classifier (smoothness prior) • equvalence to Gibbs random fields (gibbs distribution, exponential like) • Neighbourhoods • Cliques • pairs,triples of neighbourhood points) • build the energy function
MRF • Define sites: rectangular lattice • Define labels • define neighbourhood: 4,8 point • Field is MRF: • P(f)>0 • P(fi|f{S-i})=P(fi|Ni)
Coupled MRF • Field F is an optical flow field • Field L is a field of discontinuities • line process • Position of the two fields.
Context • neighbourhoods and cliques
Energy for MAP estimation Parameters are estimatedad hoc
Energy minimization • Global minimum • Simulated annealing • Genetic Algorithms • Local minimum • Iterated Conditional Modes (ICM) (steepest decent) • Highest Confidence First (HCF) • specific site visiting
Simulatedannealing • (1) Findthe initial temperatureof the system T. • Assign initial values of the field to random • For every pixel: • Assign random valueto f(i,j) • Calculate the difference in energy before and after If the change is better (diff>0) keep it. Else keep it with the probability exp(diff/T) • (4) Repeat (3) N1 times • (5) T = f(T) where f decreases monotono • (6) Repeat (3-5) N2 times
Results (Square) OF+MRF Horn-Schunk OF