Download
1 / 30
310 likes | 570 Vues
Markov Random Fields and Gibbs Distributions. Qiang He School Of EE & CS Oregon State University. 1. Introduction. Markov random fields (MRFs). A statistical theory for analyzing spatial & contextual dependencies of physical phenomena. A Bayesian labeling problem

E N D
Markov Random Fields and Gibbs Distributions Qiang He School Of EE & CS Oregon State University
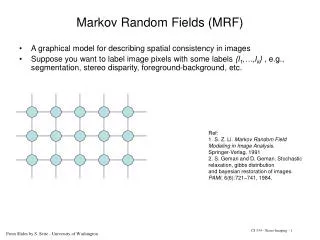
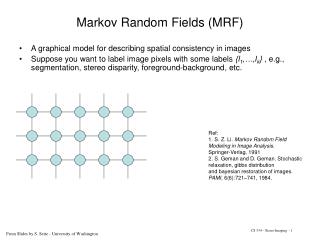
Markov random fields (MRFs) • A statistical theory for analyzing spatial & contextual dependencies of physical phenomena. • A Bayesian labeling problem • A method to establish the probabilistic distributions of interacting labels • Widely used in image processing and computer vision
Properties of MRF • Not ad hoc, can be solved based on sound mathematical principles (maximum a posterior probability, MAP) • Incorporating prior contextual information • Using local properties, which can be implemented in parallel
Image restoration process Goals • Restore degraded and noisy images • Infer the true pixels from noisy ones • Build the neighborhood systems and cliques • Define the clique potentials for prior probability • Derive the likelihood energy • Compute the posterior energy • Solve the MAP
Definition for symbols = set of sites or nodes = neighbors = a nondirected graph = hidden “true “ pixel = observed “noisy “ pixel
Neighborhood Systems A neighborhood system for is defined as where is the set of sites neighboring . The neighboring relationship has the following properties: • a site is not neighboring to itself • the neighboring relationship is mutual
A clique is defined as a subset of sites in , where every pair of sites are neighbors of each other. The collections of single- site, double-site, and triple-site cliques are denoted by , , and ,… A collection of cliques is • Cliques
Basics • Random field: A family of rvs defined on the set • Configuration: a value assignment on a random field • Probability: --discrete case: joint probability --continuous case: joint PDF
Markov random fields • Positivity: • Markovianity: • Homogeneity: probability independent of positions of sites • Isotropy: probability independent of orientations of sites
Gibbs distribution: Partition function: Temperature: Energy function: Clique potentials: Special case: Gaussian distribution
Conditional probability: • Proof: MRF=GRF Extended from clique potentials: Factor into two terms Containing i or not: Remove the term containing i:
Posterior MRF energy Likelihood function: Likelihood energy: Posterior probability: Posterior energy: MAP solution:
Goals • Solve the Bayesian labeling problem, that is, find the maximum a posterior (MAP) configuration under the observation (simulated annealing process) • Compute a marginal probability (Gibbs sampling) • Solve MRF prior probability through Gibbs distribution (since MRF=GRF) • Solve likelihood function by estimating the likelihood energy and the posterior energy: coding method or least square error method • Solve the MAP • Parameter estimation
Look back at image restoration • Build the neighborhood systems and cliques 4-neighborhood system and two-site cliques • Define the prior clique potentials
Compute the likelihood energy • Compute the posterior energy
The MRF modeling is to solve the Bayesian labeling problem, that is, find the maximum a posterior (MAP) configuration under the observation • The MRF factors joint distribution into a product of clique potentials • The MRF modeling provides a systematic approach in solving image processing and computer vision problems