Download
1 / 12
120 likes | 300 Vues
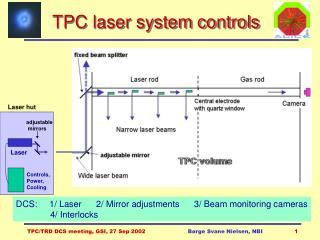
TPC laser DCS status at NBI. by Gaël Renault reported by B. S. Nielsen 6 Oct 2005. Overview. Aim: Control the laser + cameras + motors on 1 Win Xp PC Using PVSS + DIM Using as much as possible TCP/IP protocol Trying to avoid RS232. PC Win XP. Laser Control and Tracker. Spectron Laser.

E N D
TPC laser DCS status at NBI by Gaël Renault reported by B. S. Nielsen 6 Oct 2005
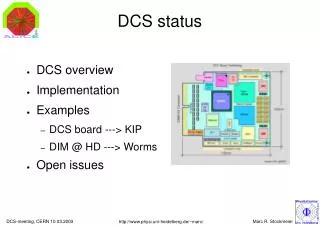
Overview • Aim: • Control the laser + cameras + motors on 1 Win Xp PC • Using PVSS + DIM • Using as much as possible TCP/IP protocol • Trying to avoid RS232 PC Win XP
Laser Control and Tracker Spectron Laser - C++ DIM server + drivers - PVSS proj. tpc_laser_dcs: + 1 panel + 1 DIM client RS232 PC Win XP Digi PortServer STATUS Running and need Digi tests Network (TCP/IP)
Note on laser HW situation: • existing Spectron laser was bought in 2001 • a 2nd laser was always planned • but, Spectron will now not produce scientific • lasers on this type ...... • --- • we are currently negociating with other • manufacturers – expect to order very soon • the new laser will have different control, • but we think that the basic communication • is compatible
Picomotors Newfocus Picomotor + Ethernet Controler - PVSS proj. tpc_laser_dcs: + 1 panel • STATUS • Running BUT • No sensor: if blocked need reposition MANUALY! • No absolute position • No DHCP • RS232 may be necessary PC Win XP RS232 Network (TCP/IP)
Cameras • STATUS • Good for 16 cameras! • Microsoft Visual C++ source • Tests on Synchronization with the laser • Tests on image acquisition • Next step image processing Frame Grabber software Camera Frame Graber BNC cable
Synchronisation • Added functionality of the system: • synchronise cameras to the laser pulse • synchronise laser pulses to LHC clock/orbit • Hardware: • TPC/TRD DCS board, placed in the laser hut • Controlled by Ethernet • TTC interface to the trigger system • TTL control signals to the laser and cameras, dedicated cables • Software: • - based on TPC/TRD system – details coming soon
Questions on equipment and database Equipment table: OK The 2 PCs now placed in the counting room Make sure that FALCONquattro framegrabber fits in the PC No ELMB foreseen. Database: Nothing to download to front-end A few (20-50) parameters need to be R/W accessed by DCS processes Static database of some 100’s values (mirror positions, ...)
FMD DCS statusB.S.Nielsen, 6 Oct 2005 • Overview drawing: CAEN Easy has been defined • Equipment inventory OK, but Do we really need 4 PCs ? ELMBs ? • FERO, loaded through 3 RCU’s: ~20 words/FMDD = 400 bytes + 51,200 pedestals • EMLB: None have been foreseen, but we will have to introduce water cooling combined with TPC heat shield. Temperature sensors are foreseen on the digitizer boards, but EMLB sensors should be considered.