Smartphone Parking System with Bayesian Network for Car Detection: A Unified Framework
This project outlines a smartphone-based parking system that leverages a Bayesian network for car detection. The system involves smartphones capturing and sending images for analysis by a server, which detects cars and free parking spaces. The car detection process is enhanced by a local detector based on PCA reconstruction and a Bayesian framework that incorporates contextual cues, improving performance for identifying cars and free spaces. The system aims to efficiently manage parking availability using a unified approach that combines local detection, contextual understanding, and Bayesian inference.

Smartphone Parking System with Bayesian Network for Car Detection: A Unified Framework
E N D
Presentation Transcript
Car detection using a Bayesian network • Hoiem, Efros, Hebert, Putting objects in perspective, IJCV, 2008 • Malagon-Borja, Olac Fuentes • Object detection using image reconstruction with PCA, IVC, 2007 Konstantin Speransky
Outline • Problem description • Local detector based on PCA reconstruction • Bayesian framework • Results • Conclusion and possible improvements
Server Smartphone Parking system design project • Smartphone: • Periodically takes and preprocess pictures • Estimate position based on consecutive GPS measurements • Send this information to the server • Server: • Gather information • Detect cars/free parking spaces from pictures • Match detection results to the map • Answer on requests about presence of free parking lots in a particular region
Local Detector 150x80 Malagon-Borja, Olac Fuentes Object detection using image reconstruction with PCA, IVC, 2007 [2]
Classifier based on PCA reconstruction Reconstruction with car eigenimages Reconstruction with background eigenimages
Similarity metrics Probability of car detection for 3% false detection rate Time in seconds to evaluate 750 windows
Detection pruning 68 -->6 Box 2 Box 1
Motivation to use contextual information • Results from the local detector are often ambiguous • Context plays a crucial role in scene understanding • Car is recognized as a car because: • it’s on the road • it has the right size in comparison to other objects • It’s a chicken and egg problem: • Scene influences detections • Detections influence scene • We need in a unified framework to combine detections and scene understanding • Picture is from [1] Hoiem, Efros, Hebert, Putting objects in perspective, IJCV, 2008 [1]
Scene projection • Pictures are from [1]
Road extraction • Steps: • Select number of reference points • Calculate the Euclidian distance between RGB values of reference pixels and all other pixels • Select only pixels that are relatively close to reference pixels in their RGB values • Find connected region among these pixels that incorporates reference pixels
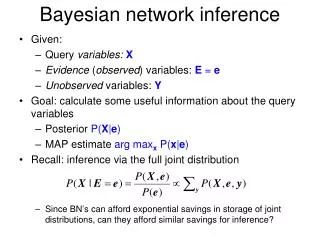
Bayesian framework Estimation: camera height + horizon Possible objects are acquired from local detector. • Possible values of geometry: • ground • vertical • vertical + ground below
Conclusion • Implemented Algorithm: • Bayesian framework combining information from the PCA-based local detector with contextual cues. • Advantages: • High performance local detector, insensitive to blurring • Bayesian network improves results further • Simple ground plane detector • Things to improve: • Computationally intensive local detector • Limitations of the ground plane detector • Objects are independent given camera position